Just now, I tested it with an Intel RealSense D435 camera and found it working. Below are the steps I followed:
- Start Intel RealSense D435 camera:
roslaunch realsense2_camera rs_camera.launch - Invoke the launch file:
roslaunch depth_to_pointcloud.launch
Below is the content of the launch file:
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" />
<node pkg="nodelet" type="nodelet" name="point_cloud_xyzrgb" args="load depth_image_proc/point_cloud_xyz standalone_nodelet">
<remap from="camera_info" to="/camera/depth/camera_info" />
<remap from="image_rect" to="/camera/depth/image_rect_raw" />
</node>
</launch>
These are all the topics I can see at the terminal:
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/color/metadata
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/metadata
/camera/extrinsics/depth_to_color
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/auto_exposure_roi/parameter_descriptions
/camera/rgb_camera/auto_exposure_roi/parameter_updates
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/clicked_point
/diagnostics
/initialpose
/move_base_simple/goal
/points
/rosout
/rosout_agg
/standalone_nodelet/bond
/tf
/tf_static
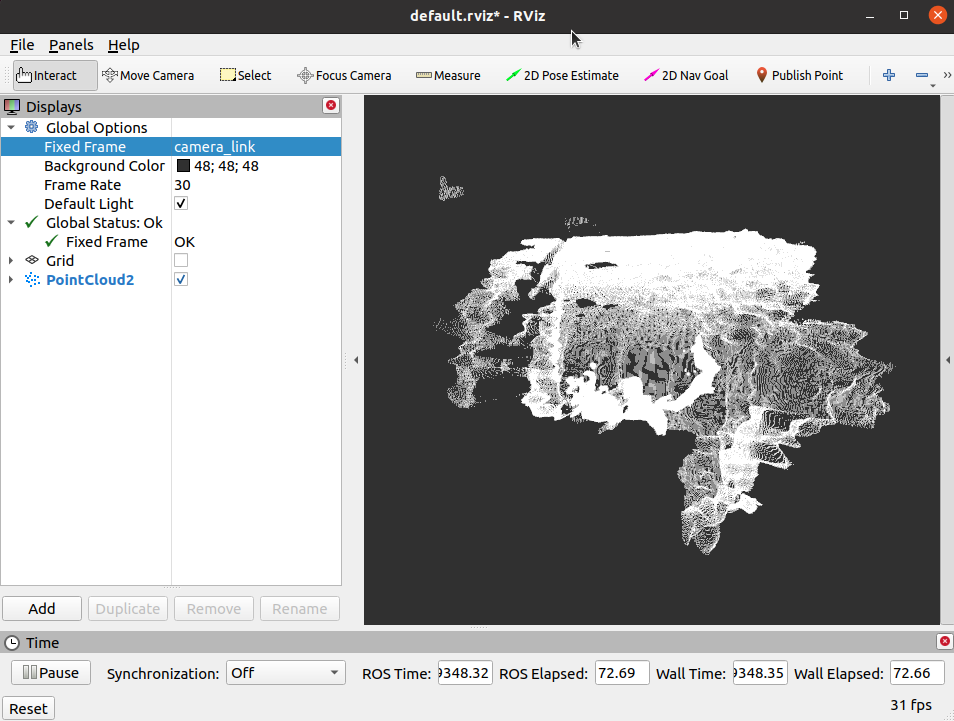
The generated point cloud is visible in RViz as shown below:
Update
The /camera/depth/camera_info topic looks like following:
$ rostopic echo -n 1 /camera/depth/camera_info
header:
seq: 0
stamp:
secs: 1662082576
nsecs: 680095911
frame_id: "camera_depth_optical_frame"
height: 480
width: 848
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [425.5743713378906, 0.0, 421.3022766113281, 0.0, 425.5743713378906, 239.98716735839844, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [425.5743713378906, 0.0, 421.3022766113281, 0.0, 0.0, 425.5743713378906, 239.98716735839844, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
The /camera/depth/image_rect_raw looks like following:
$ rostopic echo -n 1 /camera/depth/image_rect_raw
header:
seq: 3
stamp:
secs: 1662082604
nsecs: 533638000
frame_id: "camera_depth_optical_frame"
height: 480
width: 848
encoding: "16UC1"
is_bigendian: 0
step: 1696
data: [0, 255, 0, 0, 1, 0, 1, 0, 0, 0, 0, 0, 0, text removed to keep the post short , 12, 7, 8, 7, 8, 7, 3, 7, 3, 7, 3, 7, 254, 6,0, 0, 0, 0, 0, 0, 0, 0, 0]
---
Important Point
The camera info belongs to the depth image. This is why, we can see that the frame_id, height, and width attributes are the same in both topics. If they are different, a point cloud can not be generated. Therefore we ... (more)


