
Point cloud misaligned with gazebo sensor plugin
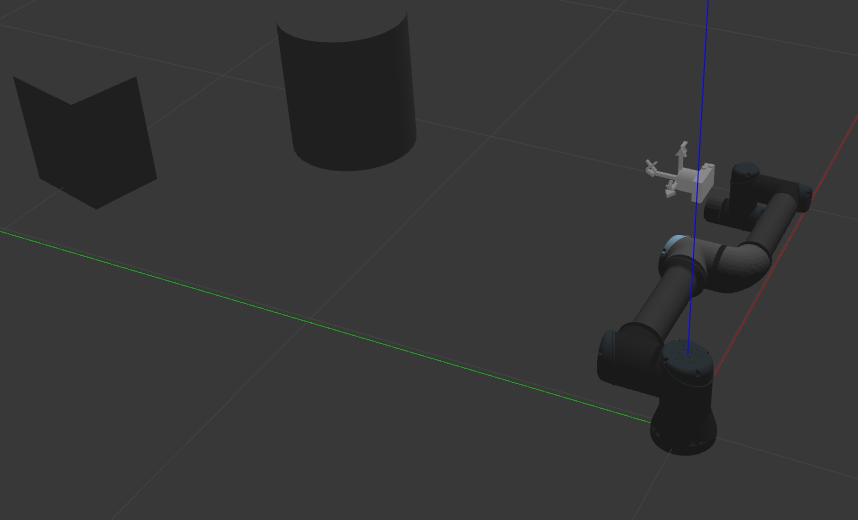
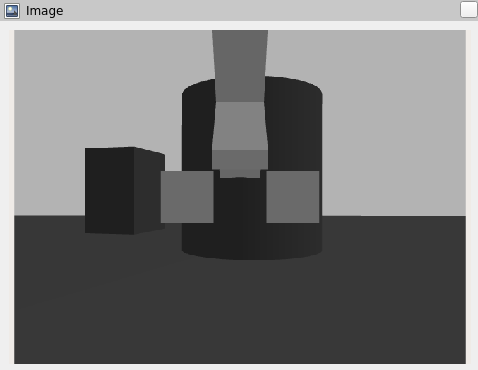
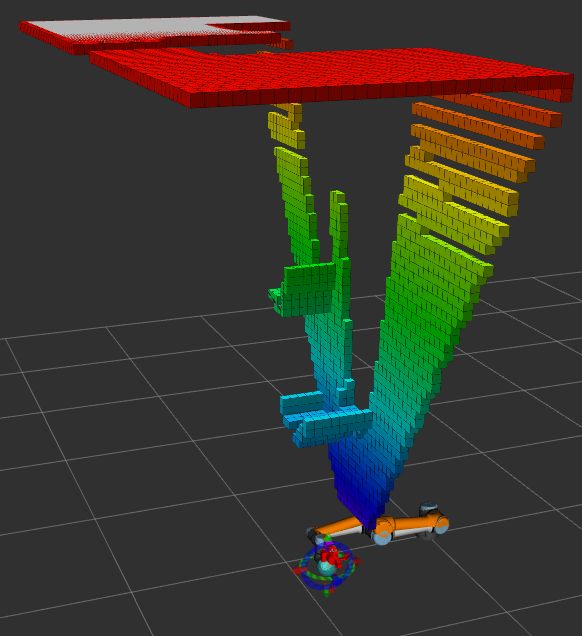
Greetings. I have inserted a camera within my gazebo simulation via the gazebo plugin. The camera works as intended, however the point cloud generated does not match the camera picture. Since Octomaps are build on the point cloud the collision map is also misaligned. I've aligned the gazebo camera plugin via optical link to the camera link (mesh and collision).
How do I get the proper orientation of the point cloud? - Since the picture in RViz matches the viewed object I would assume the point cloud would behave the same.
Camera macro:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:macro name="generate_camera" params="prefix attachment_link package_name:=modproft_camera_description camera_type:=canon_powershot_g7_mk3 debug:=false">
<xacro:include filename="$(find ${package_name})/urdf/inc/camera_common.xacro"/>
<xacro:include filename="$(find ${package_name})/urdf/inc/materials.xacro"/>
<xacro:read_camera_data model_parameter_file="$(find ${package_name})/config/${camera_type}.yaml"/>
<!-- Todo: Fix Prefix ${prefix} != " "-->
<xacro:if value="${prefix != " "}">
<xacro:property name="sensor_reference" value="${prefix}${sensor_name}"/>
</xacro:if>
<xacro:if value="${prefix == " "}">
<xacro:property name="sensor_reference" value="${sensor_name}"/>
</xacro:if>
<!-- Define gazebo sensor -->
<gazebo reference="${sensor_reference}_virtual_frame_link">
<sensor name="${sensor_reference}" type="${sensor_type}" >
<always_on>${sensor_always_on}</always_on>
<update_rate>${sensor_update_rate}</update_rate>
<camera name="${sensor_reference}">
<horizontal_fov>${sensor_horizontal_fov}</horizontal_fov>
<image>
<width>${sensor_image_width}</width>
<height>${sensor_image_height}</height>
<format>${sensor_image_format}</format>
</image>
<clip>
<near>${sensor_image_clip_near}</near>
<far>${sensor_image_clip_far}</far>
</clip>
<distortion>
<k1>${sensor_image_distortion_k1}</k1>
<k2>${sensor_image_distortion_k2}</k2>
<k3>${sensor_image_distortion_k3}</k3>
<p1>${sensor_image_distortion_p1}</p1>
<p2>${sensor_image_distortion_p2}</p2>
<center>${sensor_image_distortion_center}</center>
</distortion>
</camera>
<plugin filename="libgazebo_ros_camera.so" name="${sensor_reference}_controller">
<ros>
<imageTopicName>/${sensor_reference}/color/image_raw</imageTopicName>
<cameraInfoTopicName>/${sensor_reference}/color/camera_info</cameraInfoTopicName>
<depthImageTopicName>/${sensor_reference}/depth/image_raw</depthImageTopicName>
<depthImageCameraInfoTopicName>/${sensor_reference}/depth/camera_info</depthImageCameraInfoTopicName>
<pointCloudTopicName>/${sensor_reference}/points</pointCloudTopicName>
</ros>
<camera_name>${sensor_reference}</camera_name>
<frame_name>${sensor_reference}_virtual_frame_link</frame_name>
<hack_baseline>${sensor_hack_baseline}</hack_baseline>
<min_depth>${sensor_min_depth}</min_depth>
</plugin>
</sensor>
</gazebo>
<!-- Links -->
<link name="${sensor_reference}_link">
<visual>
<origin rpy="${camera_visual_origin_rpy}" xyz="${camera_visual_origin_xyz}"/>
<geometry>
<mesh filename="package://${package_name}/meshes/${camera_visual_geometry_mesh}" scale="${camera_visual_geometry_scale}"/>
</geometry>
</visual>
<collision>
<origin rpy="${camera_collision_origin_rpy}" xyz="${camera_collision_origin_xyz}"/>
<geometry>
<mesh filename="package://${package_name}/meshes/${camera_visual_geometry_mesh}" scale="${camera_visual_geometry_scale}"/>
</geometry>
<material name="${camera_visual_material}"/>
</collision>
<inertial>
<mass value="${camera_inertial_mass}"/>
<origin rpy="${camera_inertial_origin_rpy}" xyz="${camera_inertial_origin_xyz}"/>
<inertia ixx="${camera_inertial_inertia_ixx}" ixy="${camera_inertial_inertia_ixy}" ixz="${camera_inertial_inertia_ixz}" iyy="${camera_inertial_inertia_iyy}" iyz="${camera_inertial_inertia_iyz}" izz="${camera_inertial_inertia_izz}"/>
</inertial>
</link>
<link name="${sensor_reference}_virtual_frame_link">
<!-- Todo: Fix debug condition block-->
<xacro:if value="${debug != 'False'}">
<visual>
<geometry>
<mesh filename="package://${package_name}/meshes/${virtual_visual_geometry_mesh}" scale="${virtual_visual_geometry_scale}"/>
</geometry>
</visual>
</xacro:if>
</link>
<!-- Joints -->
<joint type="fixed" name="${prefix}${attachment_link}_${sensor_name}_joint">
<origin rpy="${cameraattachment_joint_origin_rpy}" xyz="${cameraattachment_joint_origin_xyz}"/>
<child link="${sensor_reference}_link"/>
<parent link="${prefix}${attachment_link}"/>
</joint>
<joint type="fixed" name="${prefix}${attachment_link}_${sensor_name}_virtual_frame_joint">
<origin ...add a comment

