
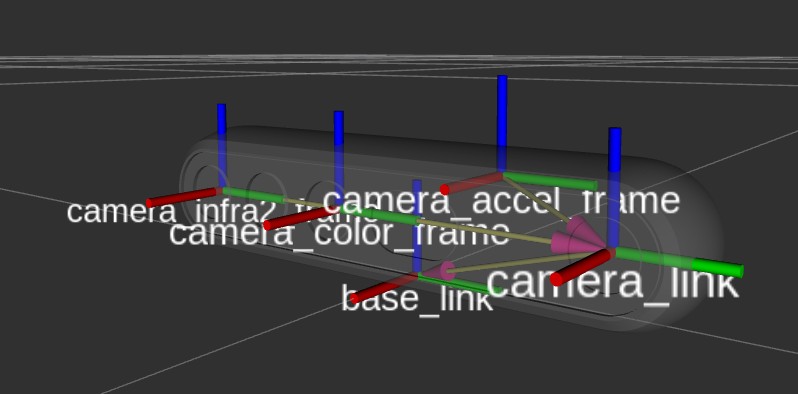
What link of realsense D455 should I put inside an existing robot arm urdf file?
I want to add realsense d455 model and its tf to an existing robot arm urdf. What link should I add to my robot arm urdf ?
add a comment
