
Broken tf tree
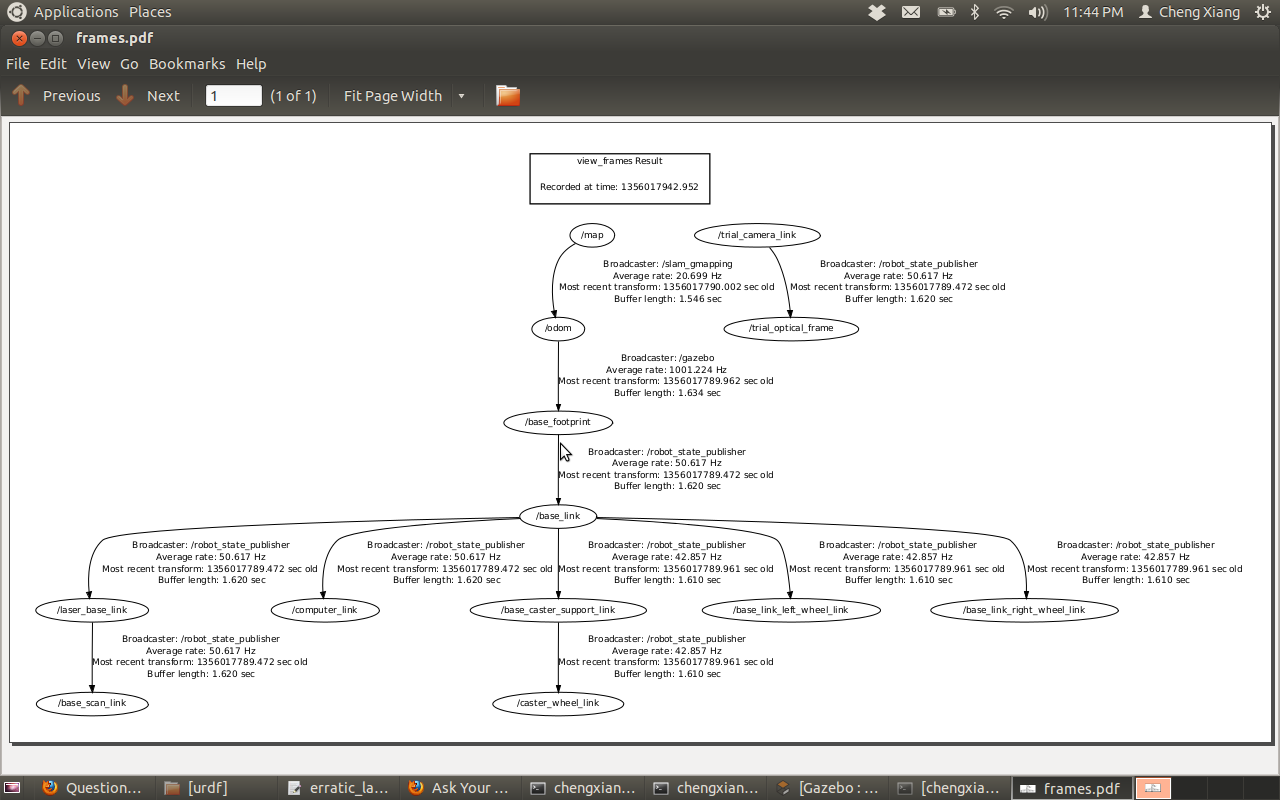
Hi, I encountered a problem while adding a continuous joint between 2 links, the base_scan_link and the trial_camera_link. The tf transformation between the 2 links works when the joint type is "fixed", but when I changed it to "continuous" or "revolute", the tf transformation broke down (see the /trial_camera_link -> /trial_optical_frame).
However, when I check my urdf using the command line tool "check_urdf", it shows that the links are joined.
chengxiang@ubuntu:~$ rosrun urdf check_urdf /tmp/erratic.urdfrobot name is:
erratic
---------- Successfully Parsed XML ---------------
root Link: base_footprint has 1 child(ren)
child(1): base_link
child(1): base_caster_support_link
child(1): caster_wheel_link
child(2): base_link_left_wheel_link
child(3): base_link_right_wheel_link
child(4): computer_link
child(5): laser_base_link
child(1): base_scan_link
child(1): trial_camera_link
child(1): trial_optical_frame
This is the joint tag, did I miss something?
<joint name="camera_joint" type="continuous">
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="0 1 0"/>
<parent link="base_scan_link" />
<child link="trial_camera_link"/>
</joint>
Can anyone point out what is my mistake? Thank you.
Updates: This is the msg I get after running rostopic echo on /joint_states
header:
seq: 1685
stamp:
secs: 16
nsecs: 881000000
frame_id: ''
name: ['base_caster_support_joint', 'caster_wheel_joint',
'base_link_left_wheel_joint', 'base_link_right_wheel_joint']
position: [-0.014502582708889378, -0.6869539514585625, -0.00398788157537755,
-0.007454428248815148]
velocity: [0.051682059495132174, -0.009866431261450204, 0.0022585278517509577,
-0.004541821383680124]
effort: [0.0, 0.0, 0.0, 0.0]
add a comment

