
3d: octomap or PCL (pointcloud lib)?
Hi all
I am trying to have the navigation stack running and generate a 3d map; after using octomap, I got something like this:
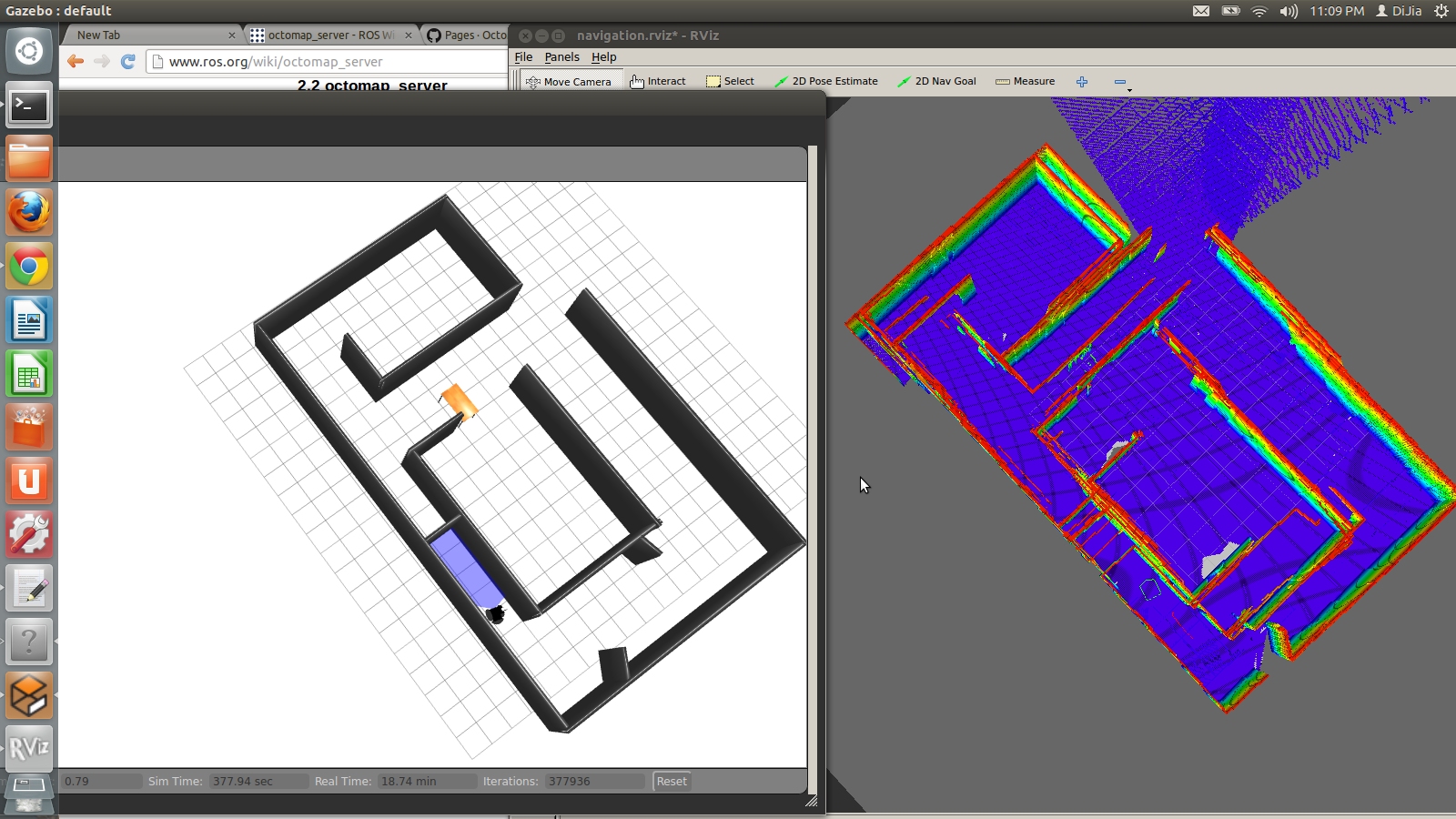
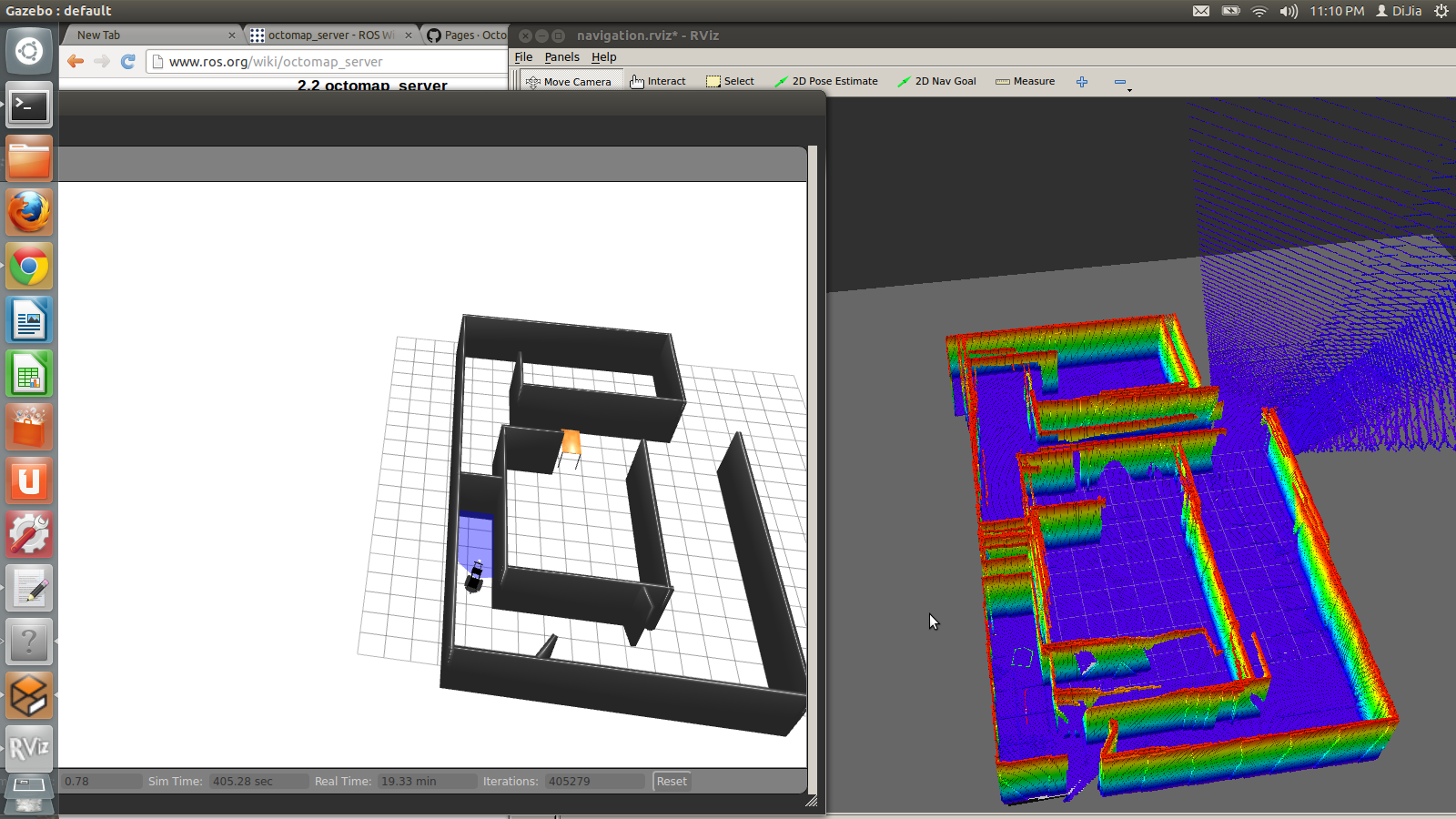
The robot as if is going through a wall. The 2d map is self correcting itself in realtime, while the 3d map generated by octomap is not; the marker array published by octomap will never be update or erased.
So I am wondering, is PCL an alternative for doing 3d mapping?
Thank you in advance
add a comment

