how to point and click on rviz map and output the position.
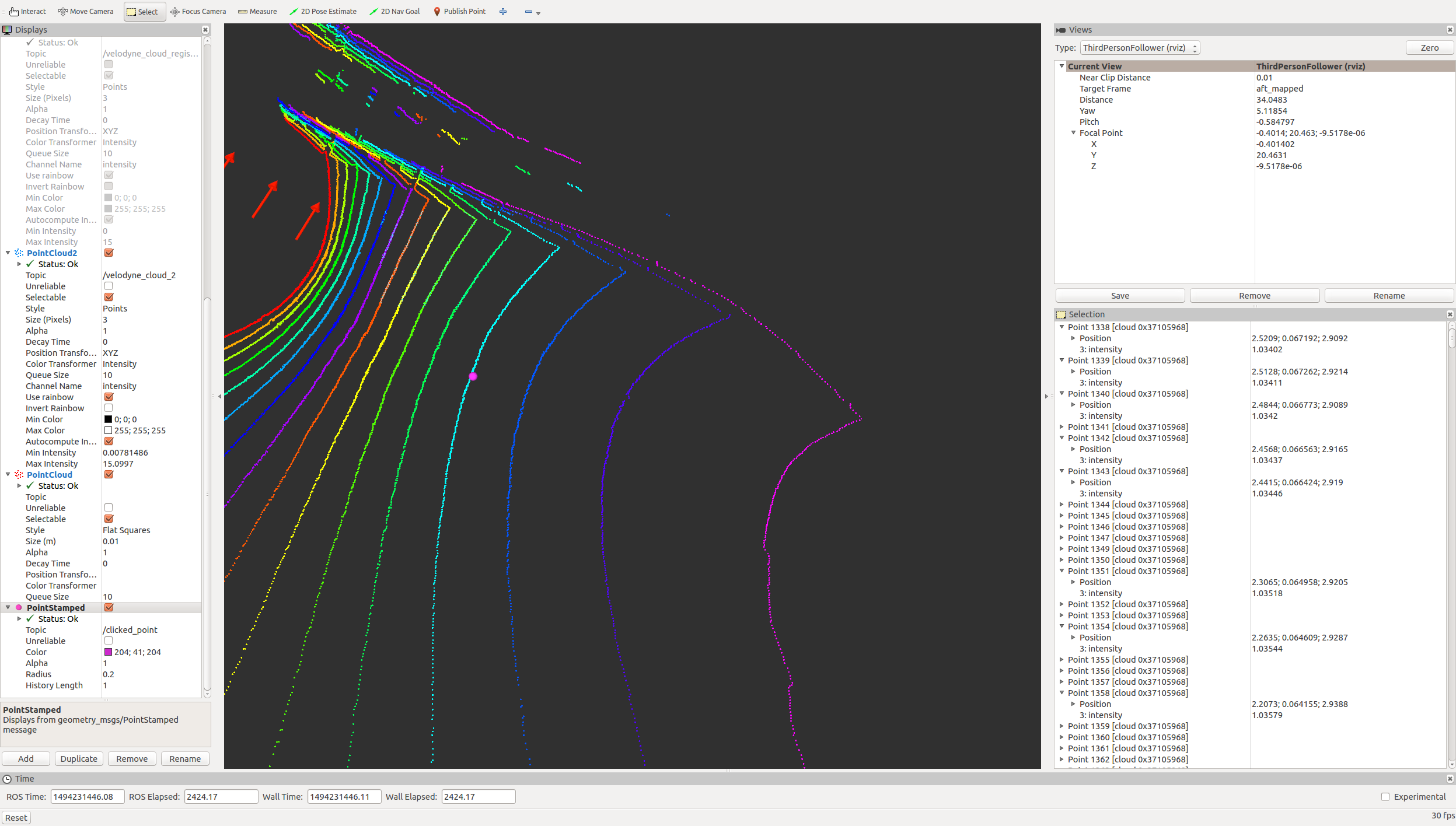
Can any one tell me how to use mouse to click on a map in Rviz and get the position of this area. Then output it.
add a comment