
robot_description synchronization gazebo RViz
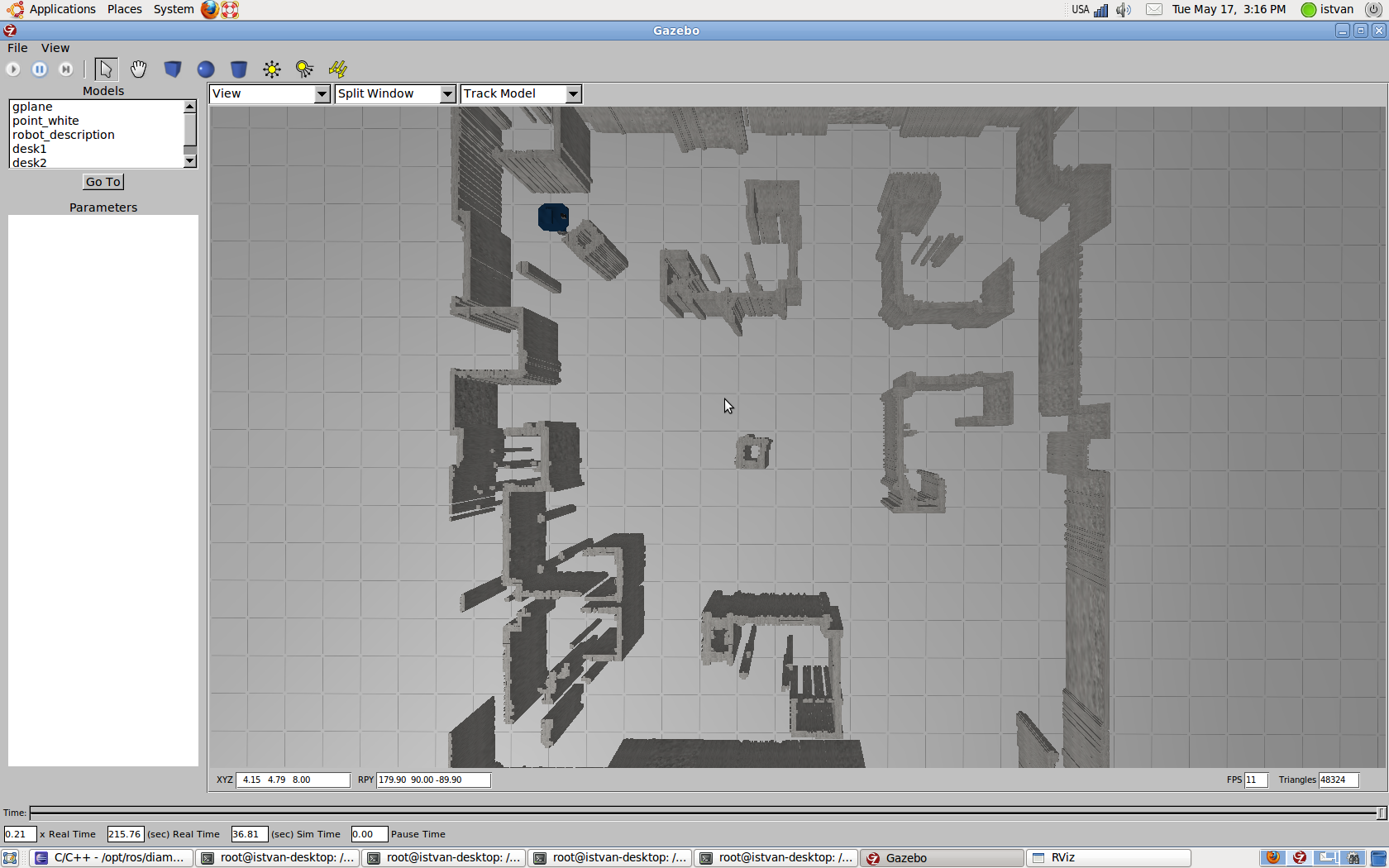
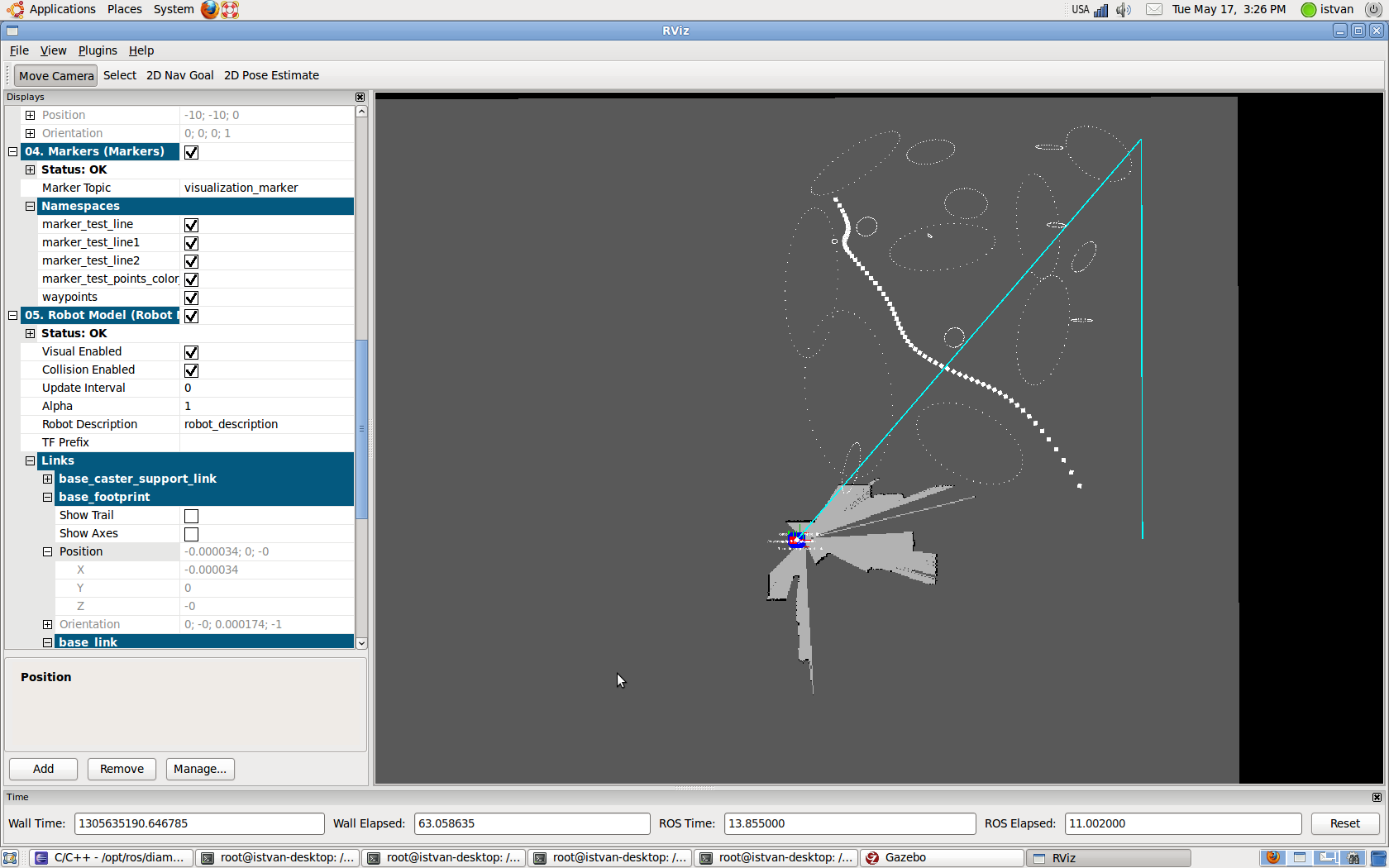
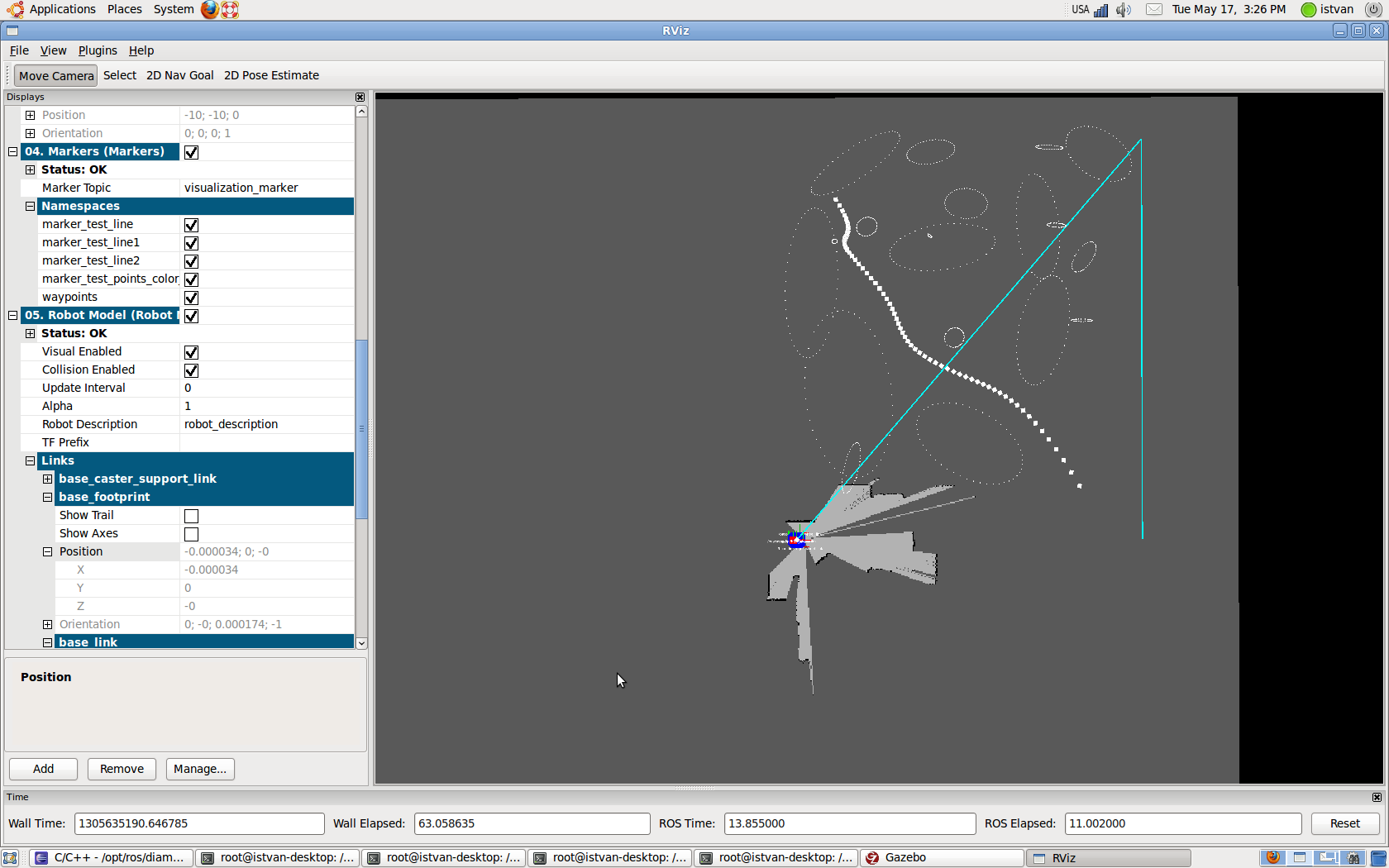
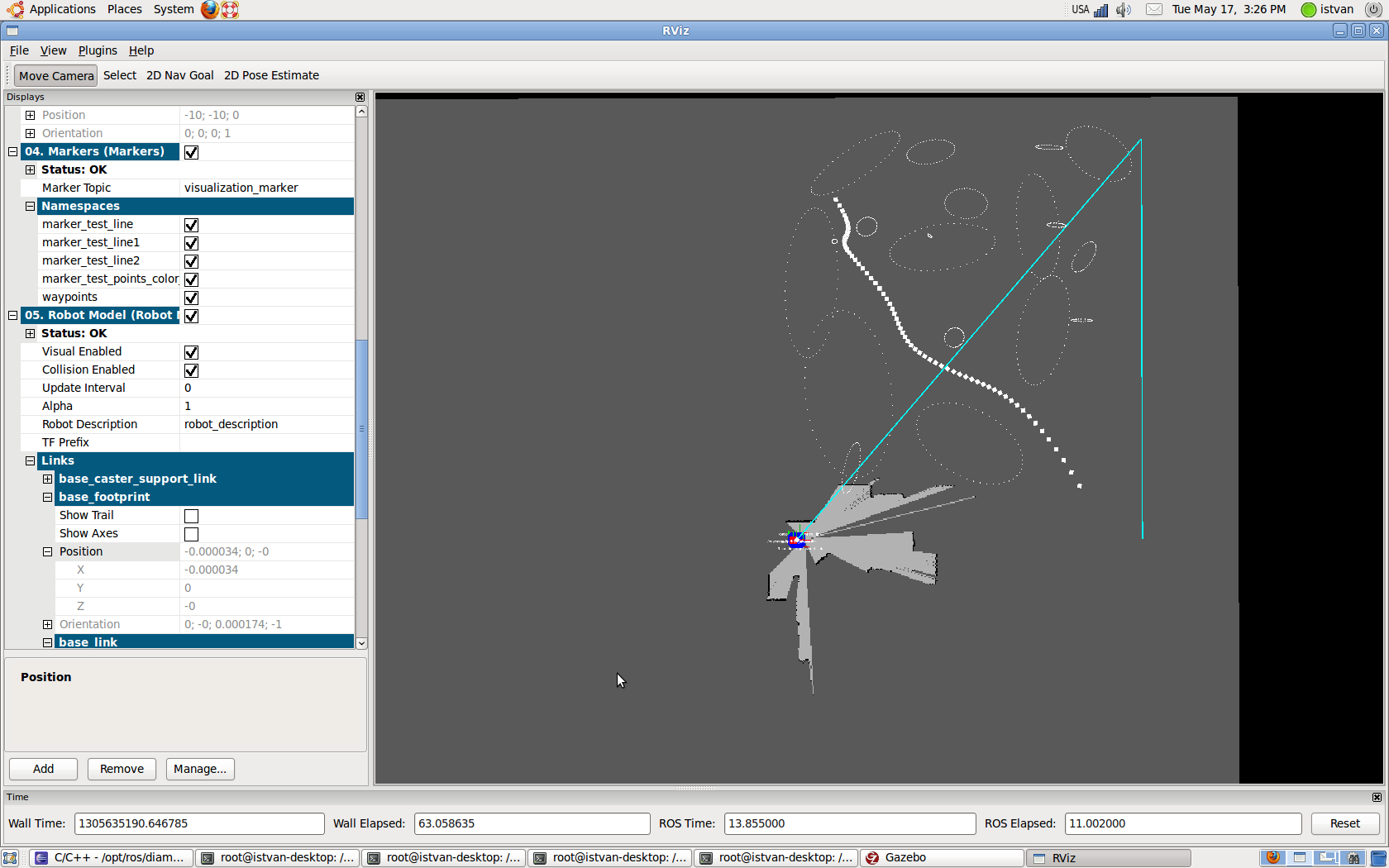
My objective is to synchronize the position of the robot in Gazebo and RViz. In Gazebo the robot model is launched into a position different than the origin while in RViz the position is set from the transform odom->base_footprint sent by gazebo, but the robot didn't moved from it's initial position hence is clear why im getting (0,0). How to load the Robot Model into RViz in a specified location.Thank you!
Comments
Thanks for adding to ROS Answers. For additions to your original question. Please use the 'edit' link below your question. The 'Answers' field should be reserved for answers so we can keep the system working correctly.
add a comment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}