Robot not following path in Nav. Stack
Hi community. I'm setting up the navigation stack in my own robot. As I see in a REP, the tf tree is the next:
map -> odom -> chassis_footprint -> chassis -> others (wheels, lasers, ...)
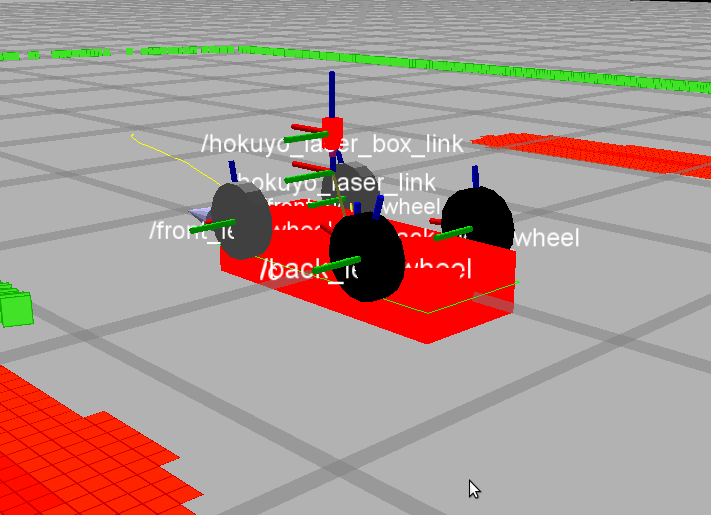
Well, the robot it's represented correctly in rViz (for this, first I launch the robot in gazebo, next I launch the nav. stack and finally I launch the rViz) and furthermore if I set a 2D Goal the robot make a correct path, although the robot doesn't follow it.
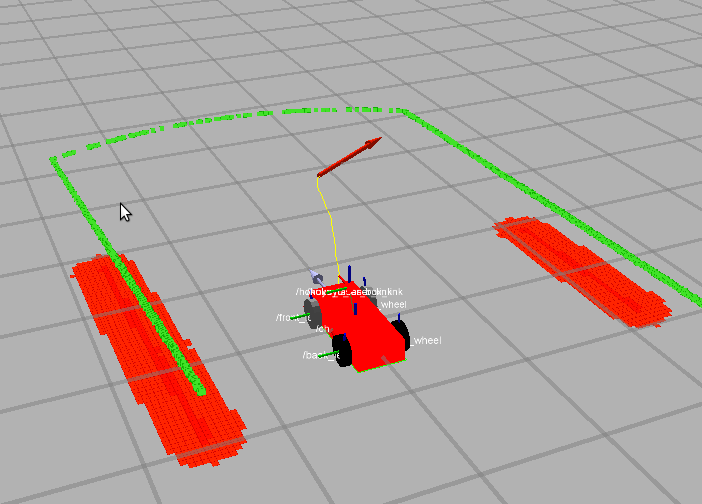
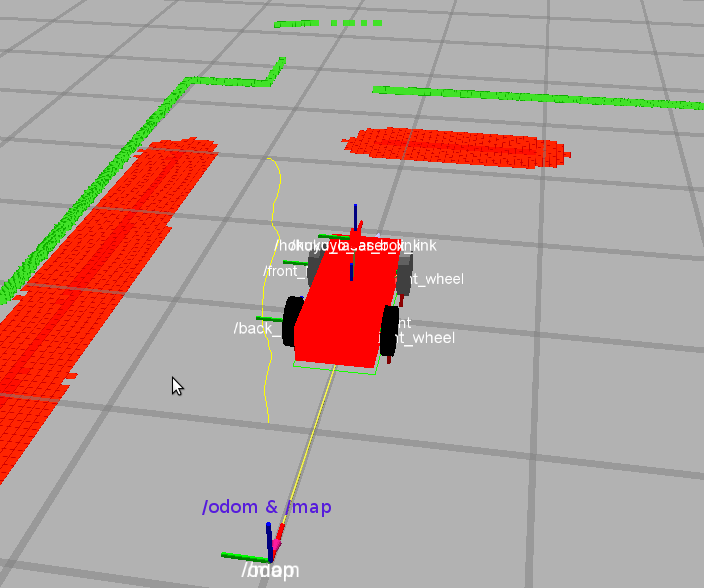
In addition, if I change the fixed frame - target frame in the rViz to anything that isn't the chassis (like /odom, /map, /chassis_footprint) the robot is saw like this:
I think that there be a problem in the tf, but rViz not give any error, although I must say that some frames "jumps" in a rare way.
My tf's are the next:
In tf_broadcaster:
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.0,0.0,0.0)),ros::Time::now(), "map", "odom"));
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.0,0.0,0.0)),ros::Time::now(),"chassis_footprint", "chassis"));
broadcaster.sendTransform(tf::StampedTransform(tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.12,0.0,0.285)),ros::Time::now(),"chassis", "hokuyo_laser_link"));
In the odometry node:
//since all odometry is 6DOF we'll need a quaternion created from yaw
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(robot_pose_pa_);
//first, we'll publish the transform over tf
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "chassis_footprint";
odom_trans.transform.translation.x = robot_pose_px_;
odom_trans.transform.translation.y = robot_pose_py_;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//send the transform over /tf
odom_broadcaster.sendTransform(odom_trans);
What is happening and what I'm doing incorrectly? I am very new in the tf's and any idea is appreciated. Thanks!