The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2023-12-05 17:54:42 -0500 | received badge | ● Popular Question (source) |
| 2023-12-05 17:54:42 -0500 | received badge | ● Notable Question (source) |
| 2023-11-15 07:44:25 -0500 | received badge | ● Popular Question (source) |
| 2023-11-15 07:44:25 -0500 | received badge | ● Notable Question (source) |
| 2023-11-15 07:44:25 -0500 | received badge | ● Famous Question (source) |
| 2023-08-31 02:19:10 -0500 | received badge | ● Popular Question (source) |
| 2023-08-31 02:19:10 -0500 | received badge | ● Notable Question (source) |
| 2023-08-11 01:10:43 -0500 | received badge | ● Popular Question (source) |
| 2023-08-11 01:10:43 -0500 | received badge | ● Famous Question (source) |
| 2023-08-11 01:10:43 -0500 | received badge | ● Notable Question (source) |
| 2023-08-08 02:32:08 -0500 | asked a question | How to convert or implement a CVMat to SE function in ROS2? How to convert or implement a CVMat to SE function in ROS2? I created a node for monocular inertial ORB_SLAM3. Using ROS |
| 2023-07-28 06:38:45 -0500 | edited question | How to use QoS in Subscriber with message_filters in ROS2 and C++? How to use QoS in Subscriber with message_filters in ROS2 and C++? Hi I make a use of message-filters to merge 3 ROS2 |
| 2023-07-28 03:41:37 -0500 | asked a question | How to use QoS in Subscriber with message_filters in ROS2 and C++? How to use QoS in Subscriber with message_filters in ROS2 and C++? Hi I make a use of message-filters to merge 3 ROS2 |
| 2023-07-27 02:48:52 -0500 | edited question | How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic? How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic abd publish it? |
| 2023-07-27 01:13:36 -0500 | edited question | How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic? How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic abd publish it? |
| 2023-07-27 01:09:45 -0500 | asked a question | How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic? How to merge 3 ROS2 topics, namely attitude, angular velocity and linear acceleration into one IMU topic abd publish it? |
| 2023-07-26 05:01:37 -0500 | asked a question | Why image not recieved using ROS2 functions in the node? Why image not recieved using ROS2 functions in the node? Hi created ,monocular-inertial node for ORB_SLAM3 in ROS2 humb |
| 2023-07-26 04:57:54 -0500 | received badge | ● Notable Question (source) |
| 2023-07-25 03:34:50 -0500 | edited question | tf2 transform and pose publish with ROS2 and humble tf2 transform and pose publish with ROS2 and humble Hi I like to publish a pose using IMU and Monocular Image from ORB_ |
| 2023-07-25 03:31:55 -0500 | asked a question | tf2 transform and pose publish with ROS2 and humble tf2 transform and pose publish with ROS2 and humble Hi I like to publish a pose using IMU and Monocular Image from ORB_ |
| 2023-07-19 02:13:12 -0500 | edited question | How to get linear velocity from the linear acceleration using Euler integration in ORB_SLAM3? How to get linear velocity from the linear acceleration using Euler integration in ORB_SLAM3? Hi I would like to estima |
| 2023-07-19 00:05:23 -0500 | asked a question | How to get linear velocity from the linear acceleration using Euler integration in ORB_SLAM3? How to get linear velocity from the linear acceleration using Euler integration in ORB_SLAM3? Hi I would like to estima |
| 2023-07-07 17:46:41 -0500 | received badge | ● Popular Question (source) |
| 2023-07-04 08:02:36 -0500 | received badge | ● Famous Question (source) |
| 2023-07-04 08:02:36 -0500 | received badge | ● Notable Question (source) |
| 2023-07-04 08:02:36 -0500 | received badge | ● Popular Question (source) |
| 2023-06-26 00:52:17 -0500 | received badge | ● Notable Question (source) |
| 2023-06-26 00:09:58 -0500 | edited question | Unable to build orb_slam2 with ROS2 humble and Ubuntu 22.04 Unable to build orb_slam2 with ROS2 humble and Ubuntu 22.04 Hi Im trying to use ORB_SLAM2 with Ubuntu 22.02 and ROS2 hu |
| 2023-06-25 23:11:53 -0500 | asked a question | Unable to build orb_slam2 with ROS2 humble and Ubuntu 22.04 Unable to build orb_slam2 with ROS2 humble and Ubuntu 22.04 Hi Im trying to use ORB_SLAM2 with Ubuntu 22.02 and ROS2 hu |
| 2023-06-08 05:27:20 -0500 | received badge | ● Notable Question (source) |
| 2023-06-05 00:12:06 -0500 | received badge | ● Popular Question (source) |
| 2023-06-04 21:41:20 -0500 | commented answer | Cheap RGBD camera with integrated IMU and ROS drivers I can not find it. So the OAK-D has 6 axis IMU? Not 9-axis right? Do you know any version with 9-axis IMU? |
| 2023-06-04 21:40:52 -0500 | commented answer | Cheap RGBD camera with integrated IMU and ROS drivers I can not find it. So the OAK-D has 6 axis IMU? Not 9-axis right? |
| 2023-06-04 10:22:54 -0500 | commented answer | Cheap RGBD camera with integrated IMU and ROS drivers I think there is even a cheaper RGBD camera with integrated 9 -axis IMU and its around $100 . But forgot the brand name |
| 2023-06-03 04:49:15 -0500 | edited question | Cheap RGBD camera with integrated IMU and ROS drivers Cheap RGBD camera with intergrated IMU and ROS drivers Hi I would like to use low cost RGBD camera with integrated 9-ax |
| 2023-06-03 04:46:58 -0500 | edited question | Cheap RGBD camera with integrated IMU and ROS drivers Cheap RGBD camera with intergrated IMU and ROS drivers Hi I would like to use low cost RGBD camera with integrated 9-ax |
| 2023-06-03 04:28:10 -0500 | asked a question | Cheap RGBD camera with integrated IMU and ROS drivers Cheap RGBD camera with intergrated IMU and ROS drivers Hi I would like to use low cost RGBD camera with integrated 9-ax |
| 2023-05-09 05:57:33 -0500 | received badge | ● Popular Question (source) |
| 2023-05-09 05:57:33 -0500 | received badge | ● Notable Question (source) |
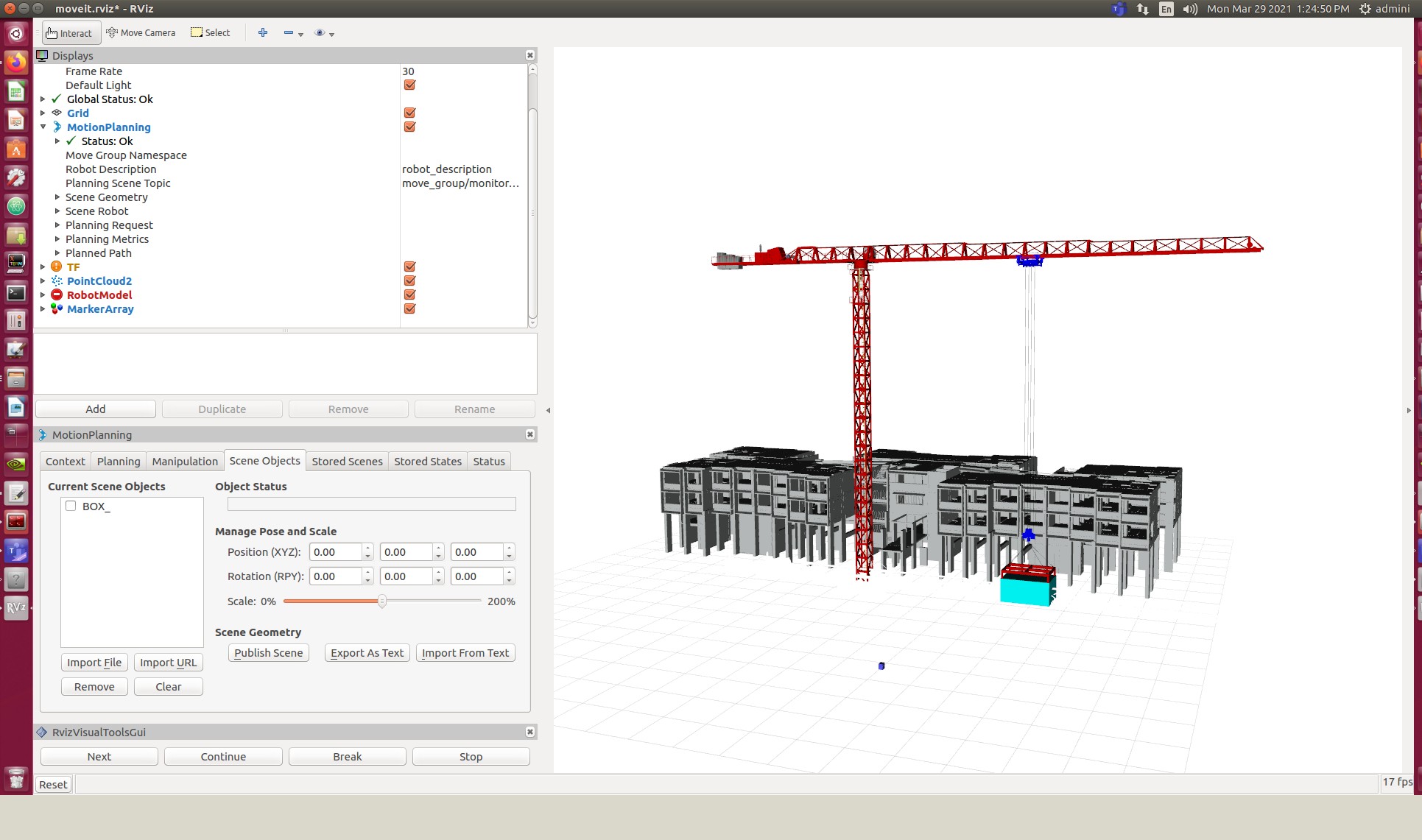
| 2023-05-04 10:53:23 -0500 | marked best answer | How can I stop the Moveit planning execution when there is a collsion between the robot and the object in the scene? Hi I have successfully introduced collision objects in the Moveit planning scene. The collision objects are real objects detected with a ZED camera and they are in the Moveit simulation as can see from this code and RVIZ screenshot. Here the collision objects code Here can see the collision object with RVIZ
So, now first I would like to give the robot a path-goal from point A to B and then when is in the collision with the object just to stop. Any Help? Thanks |
| 2023-04-28 09:36:52 -0500 | received badge | ● Citizen Patrol (source) |
| 2023-04-26 21:58:11 -0500 | edited question | Error using element_type has no member named ‘imu’, what can be? Error using element_type has no member named ‘imu’, what can be? I C++ ROS that uses sensor_msgs IMU. |
| 2023-04-26 21:54:43 -0500 | received badge | ● Popular Question (source) |
| 2023-04-26 21:54:43 -0500 | received badge | ● Notable Question (source) |
| 2023-04-26 21:46:53 -0500 | marked best answer | Is this correct implementation of standard IMU sensor message in a python ROS2 node? Hi I created a python test subscriber node for IMU standard messages. |
| 2023-04-26 21:00:52 -0500 | edited question | subscribe message subscribe different message type? Sensor IMU messages. |
| 2023-04-26 21:00:08 -0500 | edited question | subscribe message subscribe different message type? Sensor IMU messages. |
| 2023-04-26 20:56:21 -0500 | marked best answer | subscribe message Sensor IMU messages. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.