The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2023-05-01 07:16:09 -0500 | received badge | ● Guru (source) |
| 2023-05-01 07:16:09 -0500 | received badge | ● Great Answer (source) |
| 2023-04-07 02:02:23 -0500 | received badge | ● Good Answer (source) |
| 2023-03-02 04:42:00 -0500 | received badge | ● Guru (source) |
| 2023-03-02 04:42:00 -0500 | received badge | ● Great Answer (source) |
| 2023-02-24 08:22:50 -0500 | received badge | ● Good Answer (source) |
| 2023-01-02 20:56:59 -0500 | received badge | ● Great Answer (source) |
| 2023-01-02 20:56:59 -0500 | received badge | ● Guru (source) |
| 2022-12-20 04:03:02 -0500 | received badge | ● Good Answer (source) |
| 2022-10-24 10:17:48 -0500 | received badge | ● Nice Answer (source) |
| 2022-09-28 23:50:02 -0500 | received badge | ● Good Answer (source) |
| 2022-09-26 08:47:40 -0500 | marked best answer | What is the difference between acceleration and effort? In ros_control what is "effort"? How is it different from acceleration? Can I use a value meant to be acceleration in place of effort? For context I'm using moveit and ros_control with a stepper motor controller that moves the joint given a target position, a maximum velocity, and an acceleration. The controller accelerates the joint up to the given max velocity, travels a bit, and then decelerates until it stops at the target position. I currently am using joint_trajectory_controller with just a PositionJointInterface, but the arm is very poor at travelling along a cartesian path. The end effector deviates from the path by several centimeters (it's a small arm about 15cm in length) My hope is that if I specify a PositionJointInterface, VelocityJointInterface, and EffortJointInterface (using acceleration) for each joint with joint_trajectory_controller I'll see the end-effector follow a cartesian path more closely. |
| 2022-06-08 00:19:02 -0500 | received badge | ● Guru (source) |
| 2022-06-08 00:19:02 -0500 | received badge | ● Great Answer (source) |
| 2022-05-23 20:38:26 -0500 | received badge | ● Good Answer (source) |
| 2022-04-13 01:59:50 -0500 | received badge | ● Good Answer (source) |
| 2022-02-28 22:38:26 -0500 | received badge | ● Nice Answer (source) |
| 2022-02-23 06:39:24 -0500 | received badge | ● Nice Answer (source) |
| 2022-02-01 09:53:12 -0500 | received badge | ● Nice Answer (source) |
| 2021-11-05 21:46:49 -0500 | received badge | ● Nice Answer (source) |
| 2021-10-17 09:17:28 -0500 | received badge | ● Nice Answer (source) |
| 2021-09-07 12:56:00 -0500 | received badge | ● Guru (source) |
| 2021-09-07 12:56:00 -0500 | received badge | ● Great Answer (source) |
| 2021-08-04 01:39:48 -0500 | received badge | ● Good Answer (source) |
| 2021-06-25 14:06:32 -0500 | received badge | ● Great Answer (source) |
| 2021-06-06 21:43:28 -0500 | received badge | ● Great Answer (source) |
| 2021-06-06 21:43:28 -0500 | received badge | ● Guru (source) |
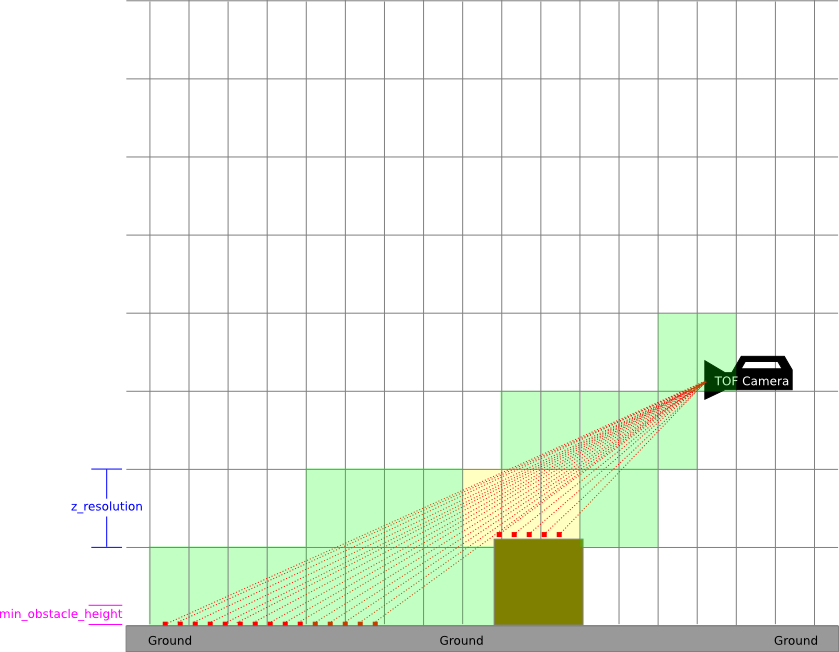
| 2021-05-25 06:05:40 -0500 | marked best answer | 3D Obstacles "forgotten" if there is a gap between 3d camera FoV and the robot base What's an algorithm or technique that doesn't forget about obstacles in the following situation? I've observed obstacles mistakenly cleared using the VoxelLayer costmap_2d plugin on ROS Jade. This happens when there is a blindspot on the floor between what the 3d camera sees and the robot due to the camera's position. Here's a side view of a ToF camera with a 90 degree field of view. The red dots are points in the point cloud sensed by the camera. The doted lines are rays from the points to the camera.
Here's a view of how VoxelLayer marks the voxels. Voxels can be free (green), occupied (yellow), or unknown (white). Voxels are cleared (set to free) when a ray passes through them. Voxels are marked (set to occupied) when a point is inside them only if the point is higher than the parameter min_obstacle_height.
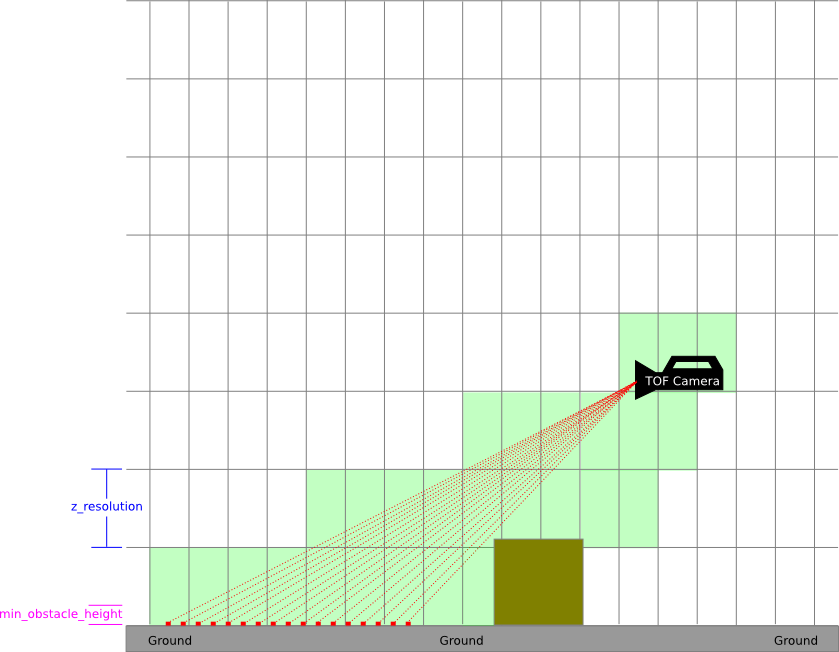
Now imagine the depth camera has moved left about two cells. The rays for the points on the ground pass through the previously marked voxels and clear them. The robot has effectively forgotten about the box in front of it.
The robot then attempts to crush the box. Ideas? |
| 2021-05-17 13:02:52 -0500 | commented question | Setting logging directory per Node in Foxy I see an API for getting the log directory, but I don't see one for setting it. https://github.com/ros2/rcl_logging/blob |
| 2021-05-03 04:17:44 -0500 | received badge | ● Nice Answer (source) |
| 2021-05-01 02:43:01 -0500 | received badge | ● Nice Answer (source) |
| 2021-04-26 12:35:20 -0500 | commented answer | how to monitorize ros2 actions from terminal? Is there a way to "watchdog" an action and see when a request is made The status topic shows when the request and r |
| 2021-04-16 13:32:31 -0500 | received badge | ● Nice Answer (source) |
| 2021-04-15 07:32:26 -0500 | received badge | ● Good Answer (source) |
| 2021-04-14 00:29:33 -0500 | received badge | ● Nice Answer (source) |
| 2021-04-13 03:10:28 -0500 | received badge | ● Nice Answer (source) |
| 2021-02-09 13:03:51 -0500 | commented question | "Error document empty" when converting collada to urdf Mind posting bloc_camera.dae. Hard to say why parsing failed. |
| 2021-02-09 11:42:46 -0500 | commented answer | subscribers in noetic seem to fail at a faster rate than in previous versions when there are a large number of subscribers ROS Noetic sync with nodelet 1.10.1 is out |
| 2021-02-04 18:10:03 -0500 | answered a question | ROS2 communication between Raspberry and host They can communicate because I've tried a ping on both machines and it's ok and I can also have SSH access on my Rasp |
| 2021-02-02 19:47:20 -0500 | edited question | ROS2 Build Error on WIN10 zstd_vendor 'patch' is not recognized as an internal or external command ROS2 Build Error on WIN10 Hi Following these instructions: https://index.ros.org/doc/ros2/Installation/Foxy/Windows-Dev |
| 2021-02-02 19:46:47 -0500 | answered a question | ROS2 Build Error on WIN10 zstd_vendor 'patch' is not recognized as an internal or external command It looks like this is a bug https://github.com/ros2/rosbag2/issues/630 Introduced by a recent change. According to this |
| 2021-02-02 19:46:47 -0500 | received badge | ● Rapid Responder (source) |
| 2021-02-02 19:36:11 -0500 | commented answer | ROS2 Build Error on WIN10 zstd_vendor 'patch' is not recognized as an internal or external command Oops, please put new info in the question. I moved the content there for you this time. Answers are only for answers to |
| 2021-02-02 19:35:04 -0500 | edited question | ROS2 Build Error on WIN10 zstd_vendor 'patch' is not recognized as an internal or external command ROS2 Build Error on WIN10 Hi Following these instructions: https://index.ros.org/doc/ros2/Installation/Foxy/Windows-Dev |
| 2021-02-02 19:28:55 -0500 | received badge | ● Rapid Responder |
| 2021-02-02 19:28:55 -0500 | answered a question | subscribers in noetic seem to fail at a faster rate than in previous versions when there are a large number of subscribers Thanks for trying out the new version of nodelet in the testing repo. Sounds like a new Noetic sync is a good idea. |
| 2021-02-02 19:25:31 -0500 | commented question | ROS2 Build Error on WIN10 zstd_vendor 'patch' is not recognized as an internal or external command The package that failed is zstd_vendor from 1 package failed: zstd_vendor, but there's not enough info to say why. Try l |
| 2021-01-28 14:20:34 -0500 | commented answer | Compilation Error on latest version of RCLCPP It looks like this question/answer is about building the very latest rclcpp, so building all the rest of ROS 2 from sour |
| 2021-01-27 14:04:36 -0500 | commented answer | ROS noetic installation failed at sudo apt-get update Thanks, fixed typo |
| 2021-01-27 14:04:27 -0500 | edited answer | ROS noetic installation failed at sudo apt-get update Could not resolve 'package.ros.org' Hmm the commands you pasted in the answer are ok, but this URL is wrong. It is |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.