The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2023-08-10 05:00:23 -0500 | received badge | ● Rapid Responder (source) |
| 2023-08-10 05:00:23 -0500 | answered a question | roscore not working but it worked before I think the error come from the fact that you are running roscore in a ROS2 distribution such as Foxy. ROS 2 doesn't ha |
| 2023-08-08 09:29:04 -0500 | received badge | ● Nice Answer (source) |
| 2023-08-08 02:15:22 -0500 | edited answer | What's the difference to name a topic with or without "/" The difference appear when using namespaces. If I am using a node with namespace "robot1" and subscribe to the topic "/m |
| 2023-08-08 02:14:42 -0500 | answered a question | What's the difference to name a topic with or without "/" The difference appear when using namespaces. If I am using a node with namespace "robot1" and subscribe to the topic "/m |
| 2023-08-08 02:14:42 -0500 | received badge | ● Rapid Responder (source) |
| 2023-07-13 07:04:33 -0500 | edited question | Can't receive messages on other machine (A message was lost) Can't receive messages on other machine (A message was lost) Hi, I am using ros2 humble, I am encountering a problem whe |
| 2023-07-13 06:30:12 -0500 | asked a question | Can't receive messages on other machine (A message was lost) Can't receive messages on other machine (A message was lost) Hi, I am using ros2 humble, I am encountering a problem whe |
| 2023-06-23 01:38:01 -0500 | received badge | ● Famous Question (source) |
| 2023-05-17 20:48:14 -0500 | received badge | ● Notable Question (source) |
| 2023-05-17 09:48:40 -0500 | commented question | Can't publish any message from machine running Ubuntu WSL to my robot @Andromeda Actually no, the ping does not work in both directions. Ping only works on WSL by pinging the machine with Ub |
| 2023-05-17 05:48:57 -0500 | received badge | ● Popular Question (source) |
| 2023-05-17 05:46:01 -0500 | commented question | Can't publish any message from machine running Ubuntu WSL to my robot Thank you for the answer, I'll check the provided link. I removed the images as requested, sorry for that |
| 2023-05-17 05:43:49 -0500 | edited question | Can't publish any message from machine running Ubuntu WSL to my robot Can't publish any message from machine running Ubuntu WSL to my robot Hi ;), i have a problem with my setup. As describe |
| 2023-05-16 13:03:44 -0500 | received badge | ● Famous Question (source) |
| 2023-05-16 10:12:26 -0500 | edited answer | Zed2i depth framerate really slow when subscribing from other machine I partially solved the problem, i used rosrun rqt_reconfigure rqt_reconfigure to change the parameters of the topic /zed |
| 2023-05-16 10:11:01 -0500 | received badge | ● Notable Question (source) |
| 2023-05-16 09:45:58 -0500 | asked a question | Can't publish any message from machine running Ubuntu WSL to my robot Can't publish any message from machine running Ubuntu WSL to my robot Hi ;), i have a problem with my setup.. As describ |
| 2023-04-03 09:35:53 -0500 | commented question | Image publishing over WiFi screeching to < 1FPS when workstation echoes topic The problem probably occur because you are using uncompressed images, try to stream compressed images using the image_tr |
| 2023-03-30 07:44:37 -0500 | edited answer | Running Gazebo and ROS on two separate computers you must have both computers on the same local network, then on each terminal you have to do: 1. export ROS_IP=IP_OF_ |
| 2023-03-30 07:44:12 -0500 | edited answer | Running Gazebo and ROS on two separate computers you must have both computers on the same local network, then on each terminal you have to do: 1. export ROS_IP=IP_OF_ |
| 2023-03-30 07:44:12 -0500 | received badge | ● Associate Editor (source) |
| 2023-03-30 07:42:50 -0500 | answered a question | Running Gazebo and ROS on two separate computers you must have both computers on the same local network, then on each terminal you have to do: 1. export ROS_IP=IP_OF_ |
| 2023-03-06 03:48:02 -0500 | commented answer | How to integrate external map->odom transform into rtabmap? Thanks for the answer, I'll try your suggestion :) |
| 2023-03-02 20:49:55 -0500 | received badge | ● Notable Question (source) |
| 2023-02-27 12:25:23 -0500 | edited question | How to integrate external map->odom transform into rtabmap? How to integrate external map->odom transform into rtabmap? Hi, I have a question about localization of a robot and i |
| 2023-02-27 09:27:15 -0500 | received badge | ● Nice Question (source) |
| 2023-02-27 09:24:19 -0500 | received badge | ● Popular Question (source) |
| 2023-02-26 02:52:47 -0500 | asked a question | How to integrate external map->odom transform into rtabmap? How to integrate external map->odom transform into rtabmap? Hi, I have a question about localization of a robot and i |
| 2023-01-16 10:06:20 -0500 | received badge | ● Nice Answer (source) |
| 2023-01-14 11:07:36 -0500 | edited answer | how to monitor network usage You can use the command line tool rostopic bw to check the bandwidth used by a certain topic. Documentation |
| 2023-01-14 11:07:21 -0500 | answered a question | how to monitor network usage You can use the command line tool rostopic bw to check the bandwidth used by a certain topic. Documentation |
| 2023-01-05 02:37:39 -0500 | received badge | ● Popular Question (source) |
| 2023-01-05 02:37:39 -0500 | received badge | ● Notable Question (source) |
| 2022-12-24 06:24:27 -0500 | received badge | ● Notable Question (source) |
| 2022-12-24 02:59:09 -0500 | edited answer | Zed2i depth framerate really slow when subscribing from other machine I partially solved the problem, i used rosrun rqt_reconfigure rqt_reconfigure to change the parameters of the topic /zed |
| 2022-12-24 02:58:57 -0500 | edited answer | Zed2i depth framerate really slow when subscribing from other machine I partially solved the problem, i used rosrun rqt_reconfigure rqt_reconfigure to change the parameters of the topic /zed |
| 2022-12-23 02:07:00 -0500 | edited answer | Zed2i depth framerate really slow when subscribing from other machine I partially solved the problem, i used rosrun rqt_reconfigure rqt_reconfigure to change the parameters of the topic /zed |
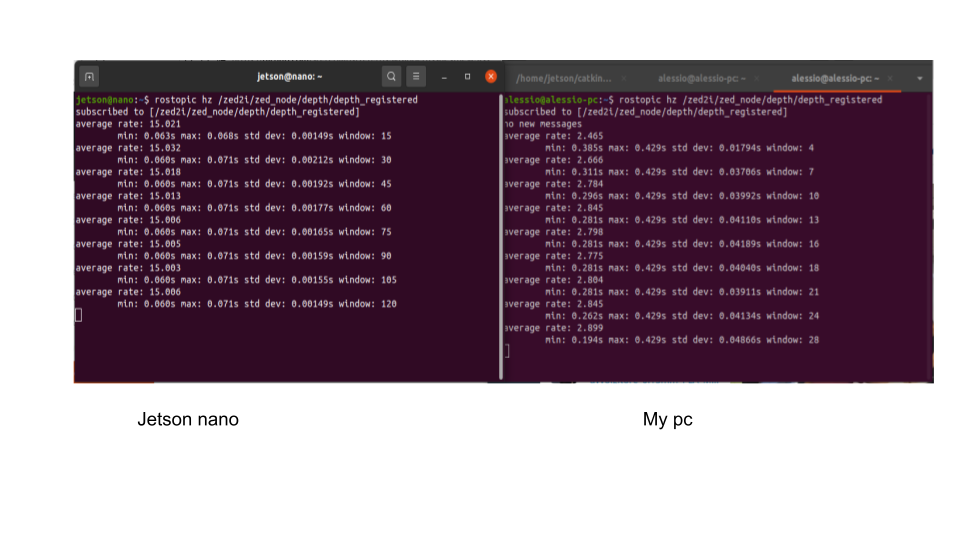
| 2022-12-23 02:06:40 -0500 | marked best answer | Zed2i depth framerate really slow when subscribing from other machine Hi, I have a problem regarding the depth computed using the Zed2i stereo camera on a jetson Nano on Ubuntu 20.04 with ROS noetic. I am using zed_ros_wrapper to connect the zed to ROS noetic. By launching the file zed2i.launch to use the camera I get about 2fps for the depth images using quality=performance (the lowest setting) when looking at the images in another computer. Some details:
I already tried subscribing to the compressed topics but nothing changed. The strange thing is that it does not seem to be a computational issue because the Nano achieve 15 fps on its terminal, and it should not be a communication issue since with normal images I get an high rate on the receiving PC.
Environment:
|
| 2022-12-23 02:06:34 -0500 | answered a question | Zed2i depth framerate really slow when subscribing from other machine I partially solved the problem, i used rosrun rqt_reconfigure rqt_reconfigure to change the parameters of the topic /zed |
| 2022-12-19 10:36:40 -0500 | received badge | ● Popular Question (source) |
| 2022-12-15 21:21:00 -0500 | marked best answer | Doubts on rtabmap stereo_odometry parameters and feature visualization Hi, I am trying to tune the many parameters of RtabMap, in particular the ones of the stereo_odometry node. I have some doubts: in this paper it's written that "for F2F (Odom/Strategy=1), optical flow is done directly on GFTT features without having to extract descriptors". My question is: if I change the parameter Vis/CorType to 0, so the correspondences computation approach is Features Matching, which approach is used? features matching or optical flow? Similarly If I change the parameter Vis/FeatureType to use different features than GFTT, is this parameter valid, or with F2F approach the only parameter used is the one described in the paper? Also another question: there is a way to view at the detected features? My idea is to plot the corners (for F2F) and wordsValues (for F2M) points in the OdomInfo message but I don't know if there is a better way. I am using Ubuntu 20.04 with ROS noetic and rtabmap built from source |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.