
Rviz doesn't update rolling-window costmap origin
If I disable and then enable costmap view in rviz, it updates. But rviz itself doesn't translate cosmap update, it draws it with old origin.
It even happens for husky_navigation example.
How could I configure rviz to view rolling-window cosmap with moving origin right?
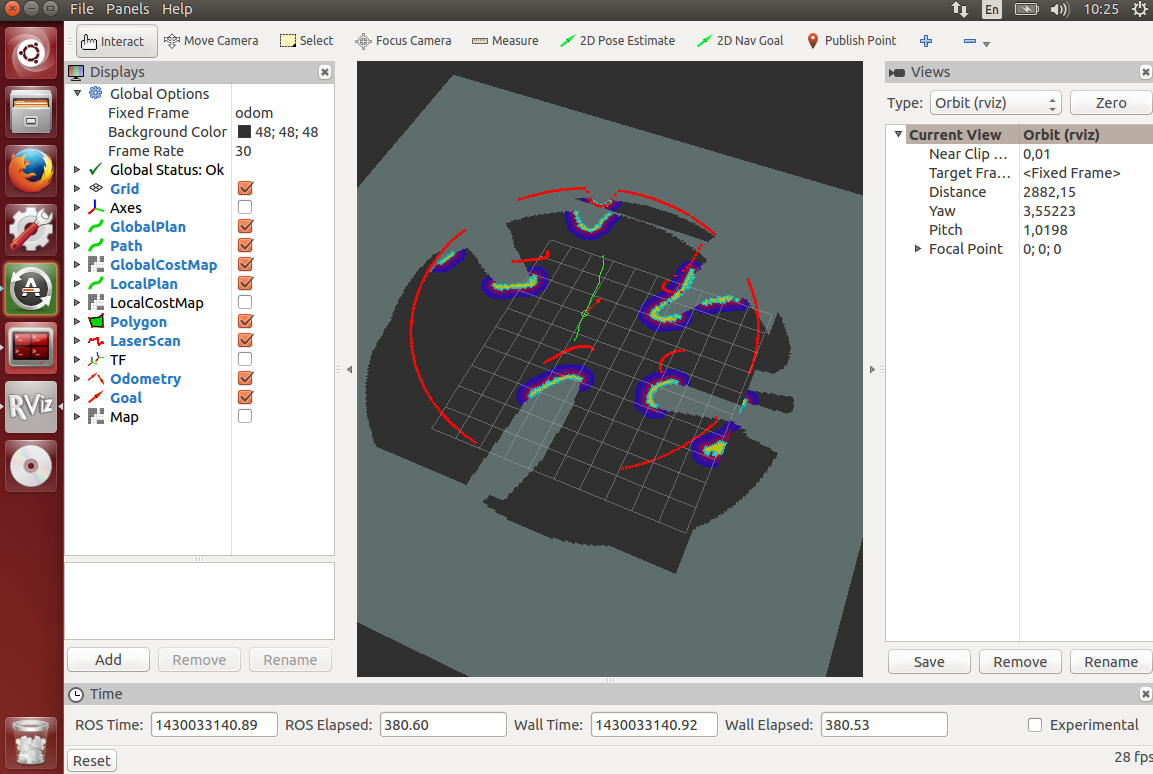
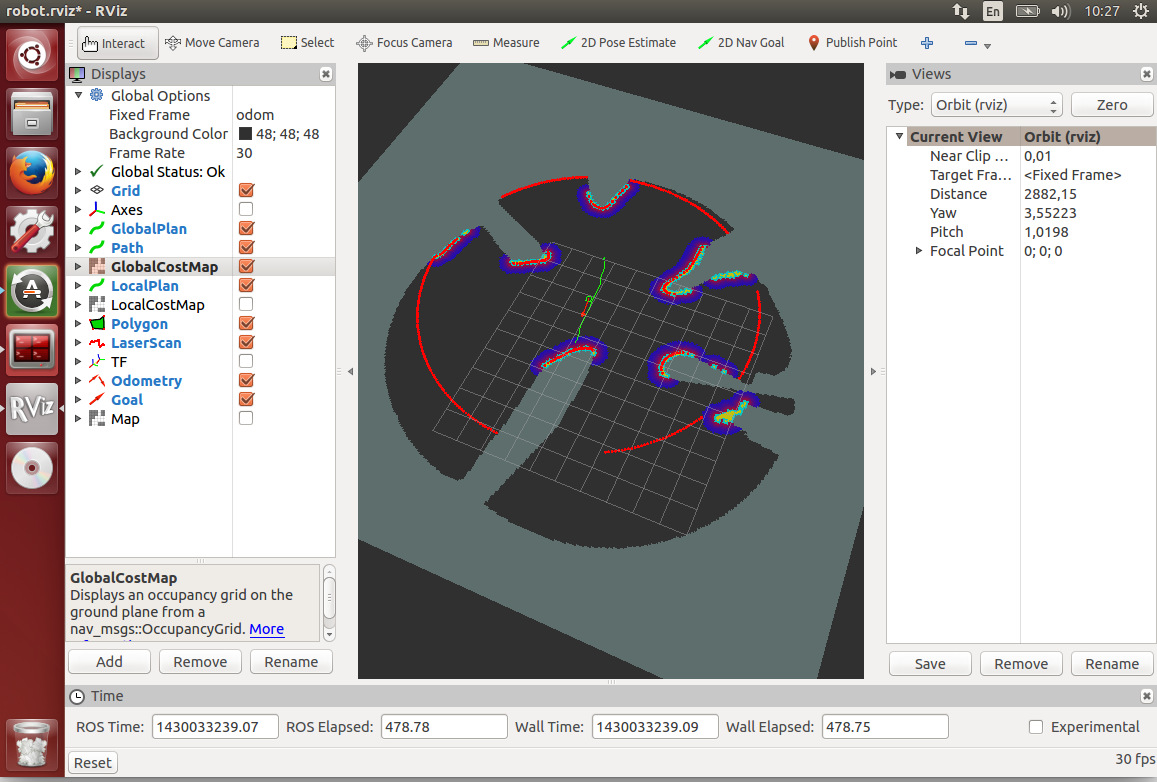
Here are 2 screenshots - first with costmap view shifted and second with correct visualisation after disable and then enable costmap view in rviz:
Here is video: video
I use ROS Indigo, Ubuntu 14.04. I tried at different computers, on VM and without, at just-installed ROS with same result.
Thanks

What version of ROS, OS, and rviz are you using? Can you give a link to the
husky_navigationexample?Ubuntu 14.04, ROS Indigo. http://wiki.ros.org/husky_navigation/...