
robot_localization: map -> odom drifts in z-direction with zero-altitude set to true
Hello everyone,
I have been playing with robot_localization package recently. I tried to fuse a GPS, 2 identical IMUs (um7) and odometry (from a Seekur robot). I went through the r_l's tutorial and made sure that all the data are properly configured: 1) IMUs report in ENU coordinate frame. IMU's frame_id are imu1_link, imu2_link for the first IMU and second IMU respectively. One note here, I used this fork for my IMUs. As it appears, this driver also converts the imu's coordinate frame to
2) odometry topic that my robot publishes has correct frame_id as odom and child_frame_id as base_link. According to this question, I disable odom->base_link transform that is published by the robot's driver.
I know that imu1 drifts a lot and imu2 doesn't. However, I think r_l is still able to handle this situation.
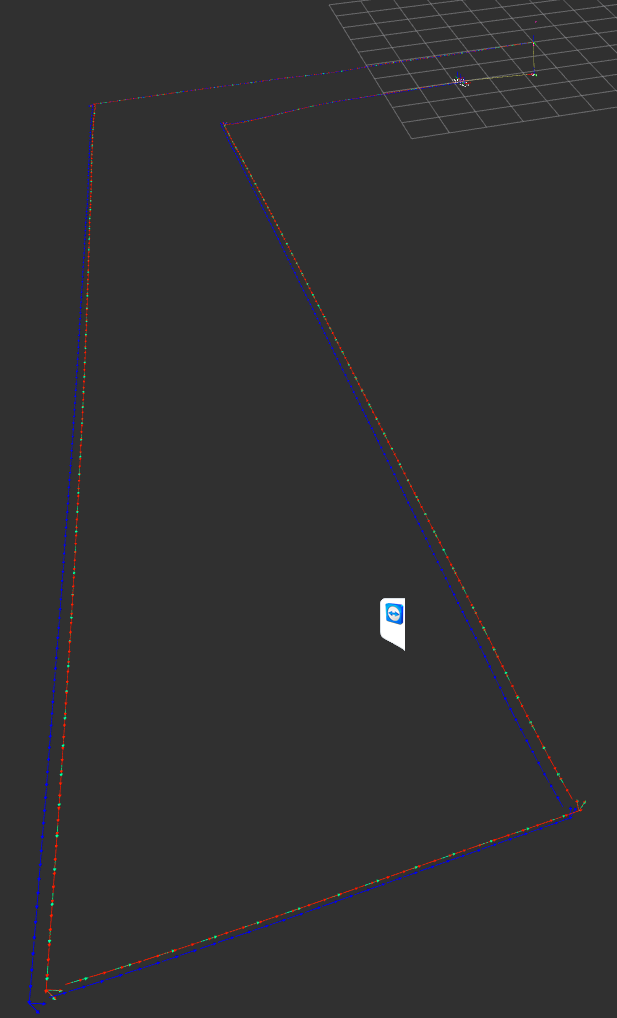
I started to fuse just imu 2, GPS and robot's odometry and the result looks fine to me. I attached the picture here:
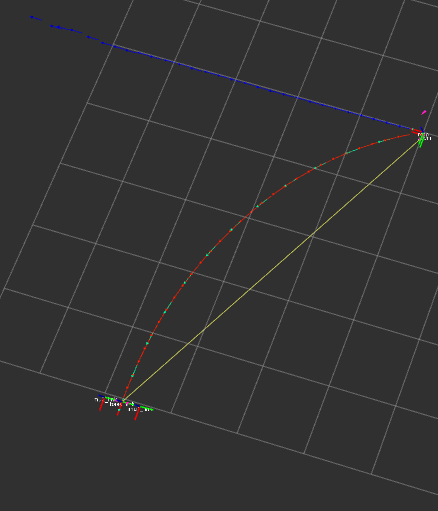
I did a second test when fusing just imu1, gps and robot's odometry. The result is as expected in the second picture. The robot moves in a wrong direction as I only feed drifted yaw measurement from IMU to the ekf_localization_node.
However, when I tried to fuse everything together: 2 IMUs, 1 GPS and 1 robot's odometry, the map->odom drifts in z direction aggressively. I tried everything that I could think off but can't solve this problem. The result is here:
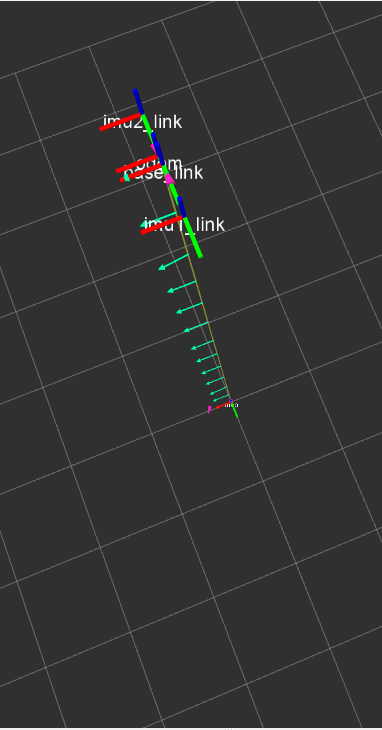
As you can see, the odom frame "flies up" indefinitely.
Here is the link to my bag, configuration and launch files: https://drive.google.com/file/d/0B10C...
I post my configuration file here with covariance matrices cutoff to make thing easier to read:
ekf_se_odom:
frequency: 20
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
print_diagnostics: true
debug: true
publish_tf: true
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
odom0: /RosAria/pose
odom0_config: [ false, false, false,
false, false, false,
true, false, false,
false, false, false,
false, false, false]
odom0_queue_size: 10
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
imu0: /imu2/data
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
false, false, false]
imu0_nodelay: true
imu0_differential: false
imu0_relative: true
imu0_queue_size: 10
imu0_remove_gravitational_acceleration: true
imu1: /imu1/data
imu1_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]
imu1_nodelay: true
imu1_differential: false
imu1_relative: true
imu1_queue_size: 10
imu1_remove_gravitational_acceleration: true
use_control: false
ekf_se_map:
frequency: 20
sensor_timeout: 0.1
two_d_mode: false
transform_time_offset: 0.0
print_diagnostics: true
debug: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: map
odom0: /RosAria/pose
odom0_config: [ false, false, false,
false, false, false,
true, false, false,
false, false, false,
false, false, false]
odom0_queue_size: 10
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
odom1: /gps_odom
odom1_config: [true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom1_queue_size: 10
odom1_nodelay: true
odom1_differential: false
odom1_relative: false
imu0: /imu2/data
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
false ...

I can't fix my images so I put them here: https://drive.google.com/file/d/0B10C...https://drive.google.com/file/d/0B10C...https://drive.google.com/file/d/0B10C...
I've given you some karma. Please attach all images to this post, so we don't have to rely on your google drive.
Thank you for your help! I edited my question!
For your problem, you'd better try to make the two nodes as same setting in two-D mode parameter. I saw one is false and another is true. By the way, when you are fusing odom and imu, did your imu2 has an absolute yaw w.r.t. ENU frame?
@jerryzhchao Thank you for pointing that our. That's was my mistake. I was able to solve my problem. Both my IMUs have absolute yaw wrt to ENU frame.