
Rviz odometry is all yellow
Hello guys! I have a problem in displaying odometry in Rviz. I use robot localization to fuse odometry from wheels and visual odometry from Kinect. When I turn on visualization in Rviza all screen seems to be yellow. And after several moves it totaly paints all with yellow colour.
I disabled tf from wheel odometry and from visual odometry. Only robot_localization provides tf with odom. Here is my robot_localization launch.
<launch>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization" clear_params="true">
<remap from="odometry/filtered" to="odom" />
<param name="frequency" value="30"/>
<param name="sensor_timeout" value="0.1"/>
<param name="two_d_mode" value="false"/>
<param name="transform_time_offset" value="0.0"/>
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="odom0" value="odom_base"/>
<param name="odom1" value="odom_visual"/>
<rosparam param="odom0_config">[true, true, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]</rosparam>
<rosparam param="odom1_config">[false, false, false,
false, false, false,
true, true, false,
false, false, false,
false, false, false]</rosparam>
<param name="odom0_differential" value="false"/>
<param name="odom1_differential" value="false"/>
<param name="odom0_relative" value="false"/>
<param name="odom1_relative" value="false"/>
<param name="use_odometry_yaw" value="false"/>-->
<param name="debug" value="false"/>
<param name="debug_out_file" value="debug_ukf_localization.txt"/>
<param name="alpha" value="0.001"/>
<param name="kappa" value="0"/>
<param name="beta" value="2"/>
</node>
</launch>
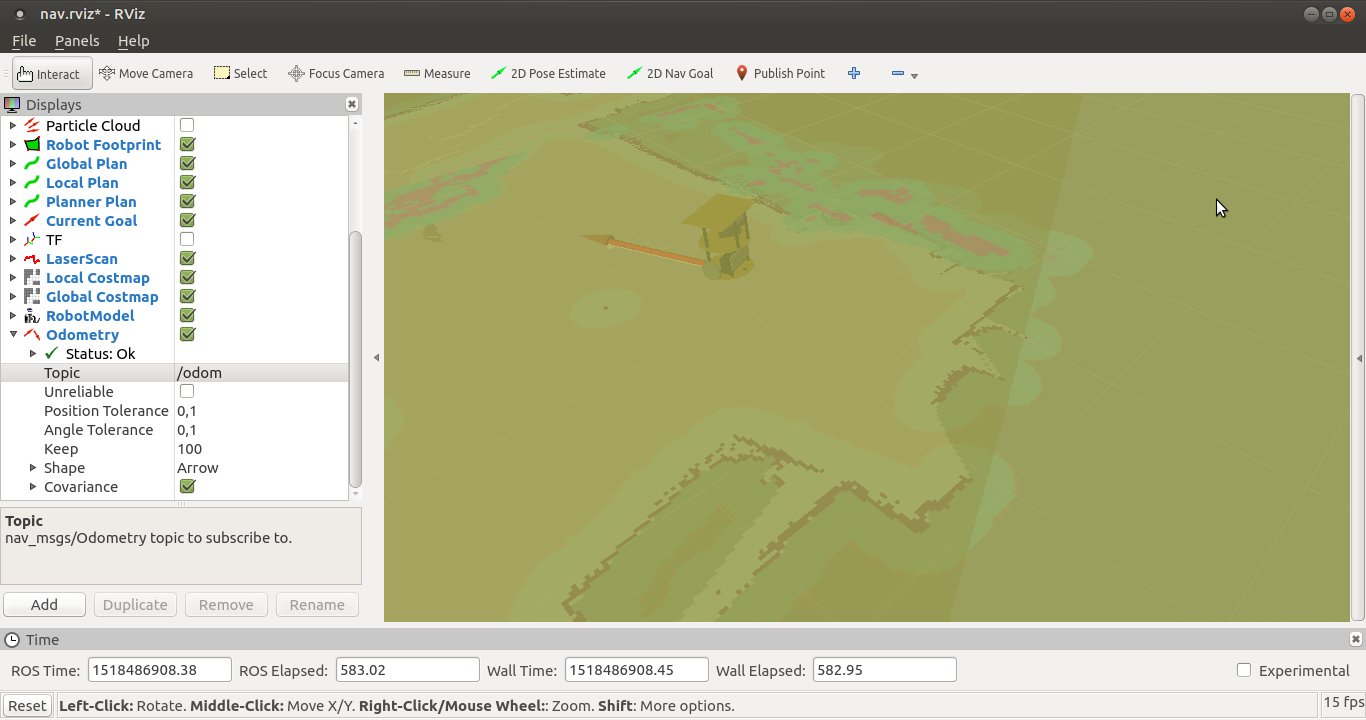
And in addition odom that I get is very inaccurate. So what's problem? Why everything is yellow?


Odometry arrows can be yellow, that is normal. Can you check whether the scaling is off? Try zooming out (mouse scrollwheel) very far. Perhaps the arrows are just really big, and the RViz view is rendered from inside the arrow.
Yes. I just zoomed out and saw what was not right. I removed check mark from "covariance" in odom display and it work ok. Thank you!
Disabling
covariancerendering is not a solution. What you're seeing could indicate that your covariances are way too large. That would not just be a visualisation problem, but a problem in general.I would suggest you try to figure out where those covariances are coming from.