(solved) Slam Generated Map Does Not Appear
A few days ago I succeed mapping on my laptop
Now I trying to mapping as hector slam on raspberry pi3 (ubuntu mate)
By the way mapping not work on raspberry
I think the environment of raspberry is equal the environment of laptop
First my procedure is
Downloading pakage about this project (Hector_Slam, ros_rplidar)
building the files (catkin make) , setting a port
modifying code of mapping_default.launch of hector_mapping file in hector slam.
<param name="map_frame" value="map" /> <param name="Base_frame" value="base_frame" /> <param name="Odom_frame" value="base_frame" /> <param name="pub_map_odom_transform" value="true"/> <node pkg="tf" type="static_transform_publisher" name="map_nav_broadcaster" args="0 0 0 0 0 0 /base_frame /laser 100"/>I did not modify anything else
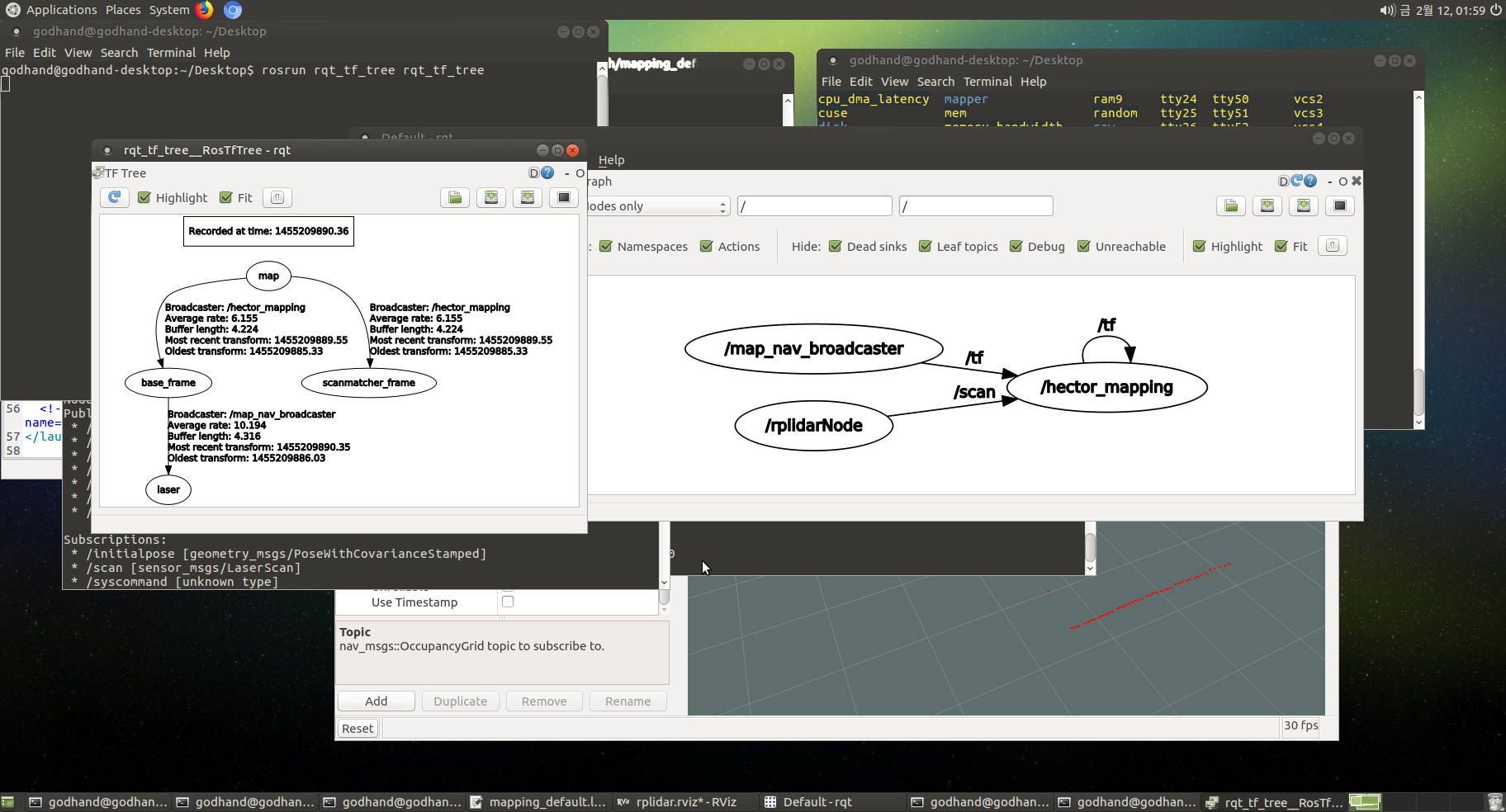
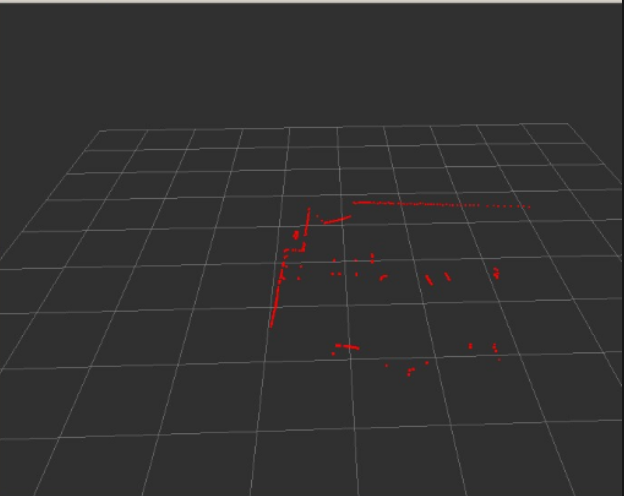
The result of implementation is like this
I changed fixed map : map , laser , base_frame and and added map on dispaly list (topic : /map)
a error not generate on terminal but also map not appear
what is problem??
add a comment