
how to use IMU sensor with relative orientation data in navsat transform node

Hi,
I am working on fusing visual odometry, IMU, and gps sensor by using a robot localization package. There are a couple of issues with my IMU data 1) it's not giving absolute orientation or heading as required by the node, it is providing relative orientation(the orientation will be zero at start irrespective of its orientation with east) 2) its orientation values are subjected to high noise (it might be due to interference and vibration on the robot). But, for the navsat_transform node, absolute heading from IMU is required to transform GPS position values to robot local map frame. As my IMU orientation values are not absolute and have high noise, I used the datum parameter in the navsat_transform node to define local-frame origin and get the initial transformation.
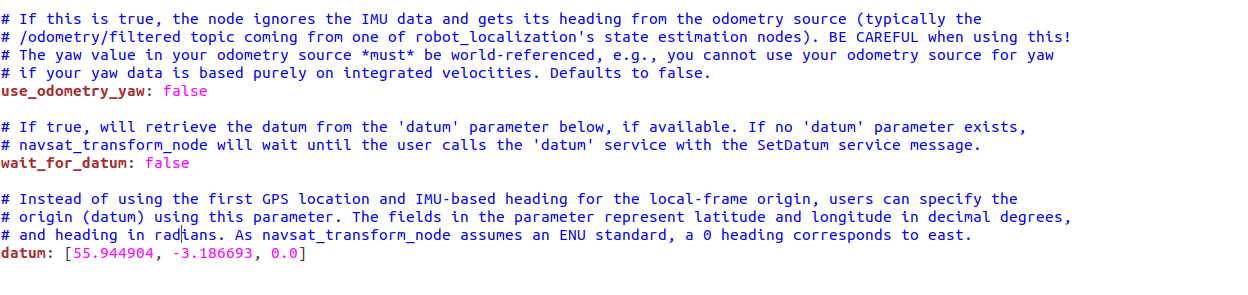
My questions are. 1) Is it the right approach to use the datum parameter if we have noisy or relative IMU orientation data?
2) Is defining this datum parameter is enough for the navsat_transform node to work (irrespective of IMU heading values) or Do I still need to provide absolute heading or orientation values to the navsat_transform node though I define datum parameter at the start?
3) If I should have to provide absolute heading or orientation values to the navsat_transform node, how can I convert the relative headings to absolute heading?
Thank you and I would be glad if someone can help with this issue.

